

The Development of Neural Network Based System Identification ...
The Development of Neural Network Based System Identification ...
The Development of Neural Network Based System Identification ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
2.4 AUTOMATIC FLIGHT CONTROL SYSTEM 41<br />
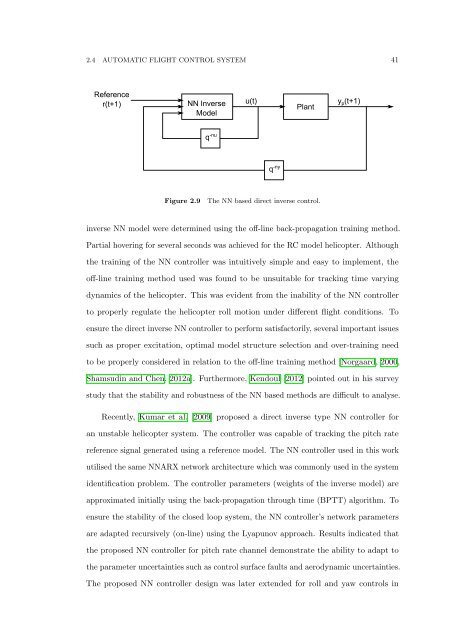
Reference<br />
r(t+1)<br />
NN Inverse<br />
Model<br />
u(t)<br />
Plant<br />
y p (t+1)<br />
q -nu<br />
q -ny<br />
Figure 2.9<br />
<strong>The</strong> NN based direct inverse control.<br />
inverse NN model were determined using the <strong>of</strong>f-line back-propagation training method.<br />
Partial hovering for several seconds was achieved for the RC model helicopter. Although<br />
the training <strong>of</strong> the NN controller was intuitively simple and easy to implement, the<br />
<strong>of</strong>f-line training method used was found to be unsuitable for tracking time varying<br />
dynamics <strong>of</strong> the helicopter. This was evident from the inability <strong>of</strong> the NN controller<br />
to properly regulate the helicopter roll motion under different flight conditions. To<br />
ensure the direct inverse NN controller to perform satisfactorily, several important issues<br />
such as proper excitation, optimal model structure selection and over-training need<br />
to be properly considered in relation to the <strong>of</strong>f-line training method [Norgaard, 2000,<br />
Shamsudin and Chen, 2012a]. Furthermore, Kendoul [2012] pointed out in his survey<br />
study that the stability and robustness <strong>of</strong> the NN based methods are difficult to analyse.<br />
Recently, Kumar et al. [2009] proposed a direct inverse type NN controller for<br />
an unstable helicopter system. <strong>The</strong> controller was capable <strong>of</strong> tracking the pitch rate<br />
reference signal generated using a reference model. <strong>The</strong> NN controller used in this work<br />
utilised the same NNARX network architecture which was commonly used in the system<br />
identification problem. <strong>The</strong> controller parameters (weights <strong>of</strong> the inverse model) are<br />
approximated initially using the back-propagation through time (BPTT) algorithm. To<br />
ensure the stability <strong>of</strong> the closed loop system, the NN controller’s network parameters<br />
are adapted recursively (on-line) using the Lyapunov approach. Results indicated that<br />
the proposed NN controller for pitch rate channel demonstrate the ability to adapt to<br />
the parameter uncertainties such as control surface faults and aerodynamic uncertainties.<br />
<strong>The</strong> proposed NN controller design was later extended for roll and yaw controls in













