

The Development of Neural Network Based System Identification ...
The Development of Neural Network Based System Identification ...
The Development of Neural Network Based System Identification ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
48 CHAPTER 2 LITERATURE REVIEW<br />
0.25<br />
Objective Criterion, J<br />
0.15<br />
0.10<br />
0.05<br />
P=1<br />
P=5<br />
P=7<br />
P=10<br />
0.00<br />
0 50 100 150 200 250 300<br />
Manipulated Input, u<br />
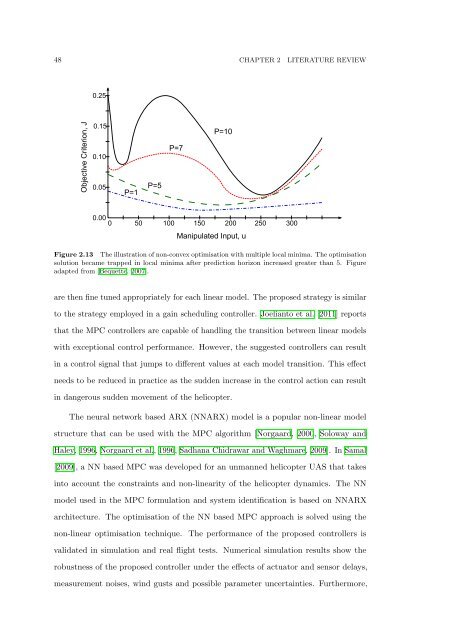
Figure 2.13 <strong>The</strong> illustration <strong>of</strong> non-convex optimisation with multiple local minima. <strong>The</strong> optimisation<br />
solution became trapped in local minima after prediction horizon increased greater than 5. Figure<br />
adapted from [Bequette, 2007].<br />
are then fine tuned appropriately for each linear model. <strong>The</strong> proposed strategy is similar<br />
to the strategy employed in a gain scheduling controller. Joelianto et al. [2011] reports<br />
that the MPC controllers are capable <strong>of</strong> handling the transition between linear models<br />
with exceptional control performance. However, the suggested controllers can result<br />
in a control signal that jumps to different values at each model transition. This effect<br />
needs to be reduced in practice as the sudden increase in the control action can result<br />
in dangerous sudden movement <strong>of</strong> the helicopter.<br />
<strong>The</strong> neural network based ARX (NNARX) model is a popular non-linear model<br />
structure that can be used with the MPC algorithm [Norgaard, 2000, Soloway and<br />
Haley, 1996, Norgaard et al., 1996, Sadhana Chidrawar and Waghmare, 2009]. In Samal<br />
[2009], a NN based MPC was developed for an unmanned helicopter UAS that takes<br />
into account the constraints and non-linearity <strong>of</strong> the helicopter dynamics. <strong>The</strong> NN<br />
model used in the MPC formulation and system identification is based on NNARX<br />
architecture. <strong>The</strong> optimisation <strong>of</strong> the NN based MPC approach is solved using the<br />
non-linear optimisation technique. <strong>The</strong> performance <strong>of</strong> the proposed controllers is<br />
validated in simulation and real flight tests. Numerical simulation results show the<br />
robustness <strong>of</strong> the proposed controller under the effects <strong>of</strong> actuator and sensor delays,<br />
measurement noises, wind gusts and possible parameter uncertainties. Furthermore,













