

The Development of Neural Network Based System Identification ...
The Development of Neural Network Based System Identification ...
The Development of Neural Network Based System Identification ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
2.4 AUTOMATIC FLIGHT CONTROL SYSTEM 49<br />
results from the flight tests provide further justification <strong>of</strong> the proposed controller.<br />
However due to demanding computation <strong>of</strong> the non-linear optimisation <strong>of</strong> the proposed<br />
method, only SISO based controller was implemented in flight. Further simplification<br />
is made to the optimisation problem where only s<strong>of</strong>t constraints are considered in the<br />
work. <strong>The</strong> hard constraints on the amplitude and the rate <strong>of</strong> the control inputs are<br />
considered only as saturation and rate limiter blocks. <strong>The</strong> limitations due to the high<br />
demanding computation <strong>of</strong> the non-linear optimisation should be addressed, in order to<br />
enable us to fully utilise the capability <strong>of</strong> the MPC technique.<br />
<strong>The</strong> implementation <strong>of</strong> the NNARX model with MPC algorithm involves high<br />
computation effort since the non-linear optimisation problem needs to be solved at each<br />
sampling time. This causes the control implementation to be only feasible with slow<br />
dynamic processes [Allgower, 2000, Norgaard, 2000]. Several alternatives to solve the<br />
non-linear optimisation problem is reported in Lawrynczuk [2007a]. Lawrynczuk [2007a]<br />
proposes that the straightforward and simple solution to the non-linear optimisation<br />
problem can be achieved by using the approximation <strong>of</strong> the non-linear model used in<br />
the MPC to resemble linear form that nearly matches the system under consideration.<br />
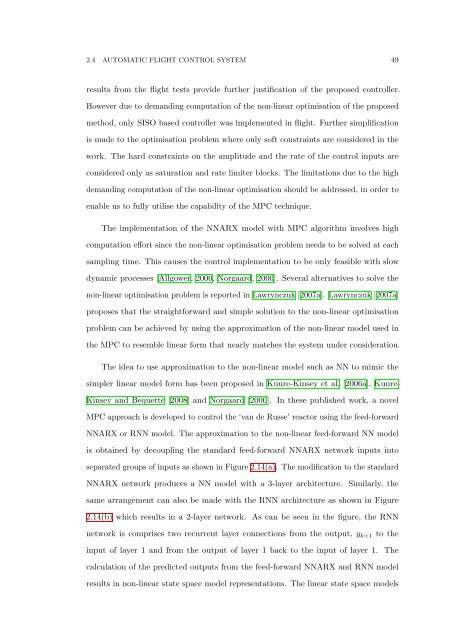
<strong>The</strong> idea to use approximation to the non-linear model such as NN to mimic the<br />
simpler linear model form has been proposed in Kuure-Kinsey et al. [2006a], Kuure-<br />
Kinsey and Bequette [2008] and Norgaard [2000]. In these published work, a novel<br />
MPC approach is developed to control the ‘van de Russe’ reactor using the feed-forward<br />
NNARX or RNN model. <strong>The</strong> approximation to the non-linear feed-forward NN model<br />
is obtained by decoupling the standard feed-forward NNARX network inputs into<br />
separated groups <strong>of</strong> inputs as shown in Figure 2.14(a). <strong>The</strong> modification to the standard<br />
NNARX network produces a NN model with a 3-layer architecture. Similarly, the<br />
same arrangement can also be made with the RNN architecture as shown in Figure<br />
2.14(b) which results in a 2-layer network. As can be seen in the figure, the RNN<br />
network is comprises two recurrent layer connections from the output, y k+1 to the<br />
input <strong>of</strong> layer 1 and from the output <strong>of</strong> layer 1 back to the input <strong>of</strong> layer 1. <strong>The</strong><br />
calculation <strong>of</strong> the predicted outputs from the feed-forward NNARX and RNN model<br />
results in non-linear state space model representations. <strong>The</strong> linear state space models













