

The Development of Neural Network Based System Identification ...
The Development of Neural Network Based System Identification ...
The Development of Neural Network Based System Identification ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
2.4 AUTOMATIC FLIGHT CONTROL SYSTEM 43<br />
Reference<br />
r(t)<br />
Reference<br />
Model<br />
y d (t)<br />
Basic<br />
Controller<br />
u b (t)<br />
u nn (t)<br />
u(t)<br />
Actuator<br />
Dynamics<br />
Plant<br />
e c<br />
+<br />
NN Controller<br />
y p (t)<br />
Sensor<br />
Dynamics<br />
-<br />
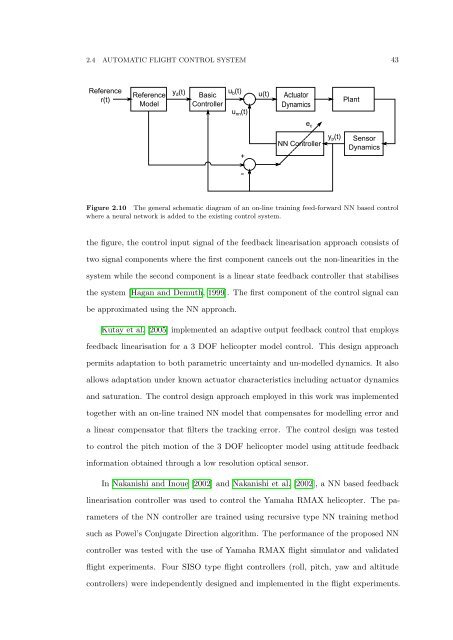
Figure 2.10 <strong>The</strong> general schematic diagram <strong>of</strong> an on-line training feed-forward NN based control<br />
where a neural network is added to the existing control system.<br />
the figure, the control input signal <strong>of</strong> the feedback linearisation approach consists <strong>of</strong><br />
two signal components where the first component cancels out the non-linearities in the<br />
system while the second component is a linear state feedback controller that stabilises<br />
the system [Hagan and Demuth, 1999]. <strong>The</strong> first component <strong>of</strong> the control signal can<br />
be approximated using the NN approach.<br />
Kutay et al. [2005] implemented an adaptive output feedback control that employs<br />
feedback linearisation for a 3 DOF helicopter model control. This design approach<br />
permits adaptation to both parametric uncertainty and un-modelled dynamics. It also<br />
allows adaptation under known actuator characteristics including actuator dynamics<br />
and saturation. <strong>The</strong> control design approach employed in this work was implemented<br />
together with an on-line trained NN model that compensates for modelling error and<br />
a linear compensator that filters the tracking error. <strong>The</strong> control design was tested<br />
to control the pitch motion <strong>of</strong> the 3 DOF helicopter model using attitude feedback<br />
information obtained through a low resolution optical sensor.<br />
In Nakanishi and Inoue [2002] and Nakanishi et al. [2002], a NN based feedback<br />
linearisation controller was used to control the Yamaha RMAX helicopter. <strong>The</strong> parameters<br />
<strong>of</strong> the NN controller are trained using recursive type NN training method<br />
such as Powel’s Conjugate Direction algorithm. <strong>The</strong> performance <strong>of</strong> the proposed NN<br />
controller was tested with the use <strong>of</strong> Yamaha RMAX flight simulator and validated<br />
flight experiments. Four SISO type flight controllers (roll, pitch, yaw and altitude<br />
controllers) were independently designed and implemented in the flight experiments.













