Elektronika 2009-11.pdf - Instytut Systemów Elektronicznych
Elektronika 2009-11.pdf - Instytut Systemów Elektronicznych
Elektronika 2009-11.pdf - Instytut Systemów Elektronicznych

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
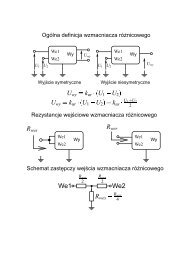
Przebieg czasowy<br />
Opis sygnału<br />
Typowe parametry i zysk<br />
przetwarzania<br />
Prosty impuls radiowy o czasie trwania t i i mocy<br />
szczytowej P i<br />
P i = 1 MW<br />
t i = 1 µs<br />
B ≅ 1/t i = 1 MHz<br />
k ≅ 1 = 0 dB<br />
Impuls z liniową modulacją częstotliwości<br />
o dewiacji ∆F, czasie trwania t i i mocy<br />
szczytowej P i<br />
P i = 100 kW<br />
t i = 10 µs<br />
B = ∆F = 3 MHz<br />
k ≅ 30 = 15 dB<br />
Sygnał stacji radiofonii FM o mocy średniej P<br />
i paśmie częstotliwości B poddany integracji<br />
w czasie t i<br />
P = 20 kW<br />
t i = 1 s<br />
B = 100 kHz<br />
k = 100 000 = 50 dB<br />
korelacji przebiegów różniących się 2-krotnie czasem trwania.<br />
Amplitudy impulsów po korelacji pokazują spodziewaną<br />
2-krotną różnicę.<br />
Charakterystyczne dla pokazanych przykładów jest to, że<br />
funkcja korelacji jest bardzo wąską „szpilką”; dokładniejsze<br />
przyjrzenie się jej pokazuje, że jest to pojedyncza próbka, a jej<br />
amplituda jest równa liczbie próbek sygnału wejściowego. Wygląda<br />
na to, że amplitudy wszystkich próbek skumulowały się<br />
w wąskiej „szpilce” funkcji korelacji.<br />
Taki idealny efekt wystąpił dlatego, że wygenerowany<br />
szum był tzw. szumem białym, który charakteryzuje się bardzo<br />
szerokim, teoretycznie nieskończonym widmem. W rzeczywistych<br />
warunkach zawsze mamy do czynienia z sygnałami<br />
o ograniczonym widmie. Jak ograniczenie widma wpływa na<br />
efekt korelacji, pokazuje rys. 5. Ten sam przebieg szumowy<br />
został poddany filtracji ograniczającej jego widmo, przy czym<br />
w realizacji (a) zastosowany był filtr od dwukrotnie szerszym<br />
paśmie przenoszenia. Na rysunkach pokazano pełny przebieg<br />
funkcji korelacji oraz rozciągnięty fragment centralny.<br />
Widać, że w obydwu przypadkach funkcja korelacji jest<br />
znacznie szersza niż poprzednio, a ponadto łatwo oszacować,<br />
że w przypadku (a) jest 2-krotnie węższa niż w przypadku<br />
(b). Jednocześnie widać, że węższa funkcja korelacji<br />
ma 2-krotnie większą amplitudę. Uwzględniwszy wcześniej<br />
pokazaną zależność od czasu integracji, dochodzimy do<br />
wniosku, że całkowity efekt procesu korelacji jest proporcjonalny<br />
do iloczynu czasu trwania integracji i szerokości widma<br />
sygnału. Ten iloczyn jest określany jako zysk procesu korelacji<br />
i zapisywany wzorem k=B⋅t i , gdzie: B jest szerokością<br />
widma sygnału, a t i - czasem integracji.<br />
Proces korelacji jest uogólnieniem procesu filtracji dopasowanej,<br />
która jest stosowana także w tradycyjnych radarach<br />
impulsowych. W tabeli zestawiono trzy rodzaje sygnału sondującego<br />
- dwa stosowane w radiolokacji bardziej tradycyjnej<br />
i sygnał nadajnika stacji radiofonicznej FM.<br />
W pierwszym wierszu tabeli mamy najbardziej tradycyjny<br />
prostokątny impuls sondujący o czasie trwania t i wypełniony<br />
sinusoidalną falą nośną. Ponieważ sygnał sondujący jest<br />
znany - wiadomo, jak optymalnie odbierać jego echo - należy<br />
zastosować filtr dopasowany, który w tym przypadku jest prostym<br />
filtrem selektywnym nastrojonym na częstotliwość fali<br />
nośnej i o szerokości pasma przenoszenia w przybliżeniu równej<br />
odwrotności szerokości impulsu sondującego, B =1/t i . Odbiór<br />
korelacyjny echa takiego impulsu dałby ten sam efekt, ale<br />
rzecz jasna zastosowanie filtru selektywnego jest znacznie<br />
prostsze i tańsze w realizacji. Naturalnie zysk procesu korelacji<br />
jest w tym przypadku równy 1.<br />
W drugim wierszu tabeli mamy przypadek typowy dla<br />
współczesnych radarów - impuls sondujący wypełniony jest<br />
falą nośną, której częstotliwość zmienia się w czasie trwania<br />
impulsu o wartość ∆F. W tym przypadku do optymalnego odbioru<br />
echa potrzebny jest filtr dopasowany do charakterystyki<br />
zmian częstotliwości wewnątrz impulsu; jeśli w impulsie<br />
sondującym częstotliwość narasta z czasem, filtr opóźnia<br />
najmniej sygnały o najwyższej częstotliwości i odpowiednio<br />
więcej opóźnia sygnały o niższych częstotliwościach.<br />
W efekcie wszystkie częstotliwości składowe jakby kumulują<br />
się w tym samym krótkim czasie, powodując tzw. kompresję<br />
impulsu. Energia impulsu na wyjściu filtru kumuluje się<br />
w czasie wielokrotnie krótszym niż czas trwania impulsu<br />
przed kompresją, a moc szczytowa impulsu na wyjściu odpowiednio<br />
rośnie, co daje zysk procesu korelacji k=∆F•t i .<br />
Chociaż występuje tu zysk korelacji, to konstruktorom tego<br />
typu radarów daje się uniknąć liczenia funkcji korelacji. Ponieważ<br />
i tym razem oczekiwany sygnał jest dokładnie znany,<br />
można tak zaprojektować filtr dopasowany, że jego działanie<br />
jest ekwiwalentne procesowi korelacji. Najbardziej znaną<br />
realizacją takiego filtru w radiolokacji jest linia dyspersyjna<br />
z akustyczną falą powierzchniową, dziś wypierana przez cyfrowe<br />
filtry kompresji.<br />
ELEKTRONIKA 11/<strong>2009</strong> 103