

Setup and Reference Guide - Kollmorgen
Setup and Reference Guide - Kollmorgen
Setup and Reference Guide - Kollmorgen

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
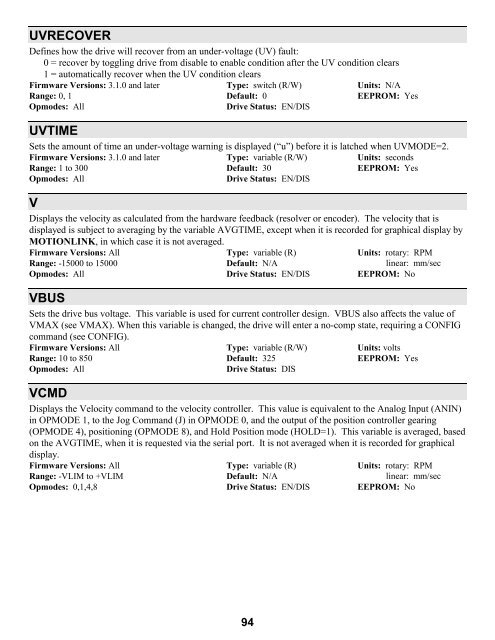
UVRECOVER<br />
Defines how the drive will recover from an under-voltage (UV) fault:<br />
0 = recover by toggling drive from disable to enable condition after the UV condition clears<br />
1 = automatically recover when the UV condition clears<br />
Firmware Versions: 3.1.0 <strong>and</strong> later Type: switch (R/W) Units: N/A<br />
Range: 0, 1 Default: 0 EEPROM: Yes<br />
Opmodes: All Drive Status: EN/DIS<br />
UVTIME<br />
Sets the amount of time an under-voltage warning is displayed (“u”) before it is latched when UVMODE=2.<br />
Firmware Versions: 3.1.0 <strong>and</strong> later Type: variable (R/W) Units: seconds<br />
Range: 1 to 300 Default: 30 EEPROM: Yes<br />
Opmodes: All Drive Status: EN/DIS<br />
V<br />
Displays the velocity as calculated from the hardware feedback (resolver or encoder). The velocity that is<br />
displayed is subject to averaging by the variable AVGTIME, except when it is recorded for graphical display by<br />
MOTIONLINK, in which case it is not averaged.<br />
Firmware Versions: All Type: variable (R) Units: rotary: RPM<br />
Range: -15000 to 15000 Default: N/A linear: mm/sec<br />
Opmodes: All Drive Status: EN/DIS EEPROM: No<br />
VBUS<br />
Sets the drive bus voltage. This variable is used for current controller design. VBUS also affects the value of<br />
VMAX (see VMAX). When this variable is changed, the drive will enter a no-comp state, requiring a CONFIG<br />
comm<strong>and</strong> (see CONFIG).<br />
Firmware Versions: All Type: variable (R/W) Units: volts<br />
Range: 10 to 850 Default: 325 EEPROM: Yes<br />
Opmodes: All Drive Status: DIS<br />
VCMD<br />
Displays the Velocity comm<strong>and</strong> to the velocity controller. This value is equivalent to the Analog Input (ANIN)<br />
in OPMODE 1, to the Jog Comm<strong>and</strong> (J) in OPMODE 0, <strong>and</strong> the output of the position controller gearing<br />
(OPMODE 4), positioning (OPMODE 8), <strong>and</strong> Hold Position mode (HOLD=1). This variable is averaged, based<br />
on the AVGTIME, when it is requested via the serial port. It is not averaged when it is recorded for graphical<br />
display.<br />
Firmware Versions: All Type: variable (R) Units: rotary: RPM<br />
Range: -VLIM to +VLIM Default: N/A linear: mm/sec<br />
Opmodes: 0,1,4,8 Drive Status: EN/DIS EEPROM: No<br />
94









