

universidad de chile dinámica de dominios en sistemas forzados ...
universidad de chile dinámica de dominios en sistemas forzados ...
universidad de chile dinámica de dominios en sistemas forzados ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
10<br />
8<br />
6<br />
4<br />
2<br />
0<br />
−2<br />
−4<br />
−6<br />
−8<br />
−10<br />
−10 −8 −6 −4 −2 0 2 4 6 8 10<br />
γ<br />
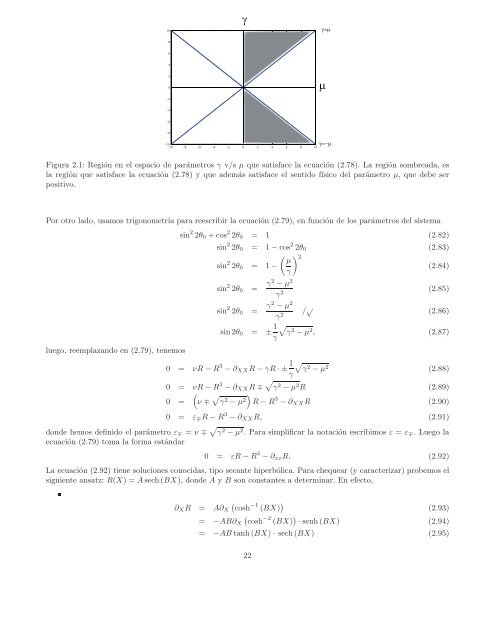
Figura 2.1: Región <strong>en</strong> el espacio <strong>de</strong> parámetros γ v/s µ que satisface la ecuación (2.78). La región sombreada, es<br />
la región que satisface la ecuación (2.78) y que a<strong>de</strong>más satisface el s<strong>en</strong>tido físico <strong>de</strong>l parámetro µ, que <strong>de</strong>be ser<br />
positivo.<br />
Por otro lado, usamos trigonometría para reescribir la ecuación (2.79), <strong>en</strong> función <strong>de</strong> los parámetros <strong>de</strong>l sistema<br />
sin 2 2θ0 + cos 2 2θ0 = 1 (2.82)<br />
γ=µ<br />
µ<br />
γ=−µ<br />
sin 2 2θ0 = 1 − cos 2 2θ0 (2.83)<br />
2 sin 2 2θ0 = 1 −<br />
µ<br />
γ<br />
sin 2 2θ0 = γ2 − µ 2<br />
γ 2<br />
sin 2 2θ0 = γ2 − µ 2<br />
(2.84)<br />
(2.85)<br />
γ2 / √<br />
(2.86)<br />
sin 2θ0 = ± 1<br />
γ2 − µ 2 , (2.87)<br />
γ<br />
luego, reemplazando <strong>en</strong> (2.79), t<strong>en</strong>emos<br />
0 = νR − R 3 − ∂XXR − γR · ± 1<br />
γ2 − µ 2<br />
γ<br />
(2.88)<br />
0 = νR − R 3 − ∂XXR ∓ γ2 − µ 2R (2.89)<br />
<br />
0 = ν ∓ γ2 − µ 2<br />
<br />
R − R 3 − ∂XXR (2.90)<br />
0 = ε∓R − R 3 − ∂XXR, (2.91)<br />
don<strong>de</strong> hemos <strong>de</strong>finido el parámetro ε∓ = ν ∓ γ 2 − µ 2 . Para simplificar la notación escribimos ε = ε∓. Luego la<br />
ecuación (2.79) toma la forma estándar<br />
0 = εR − R 3 − ∂xxR. (2.92)<br />
La ecuación (2.92) ti<strong>en</strong>e soluciones conocidas, tipo secante hiperbólica. Para chequear (y caracterizar) probemos el<br />
sigui<strong>en</strong>te ansatz: R(X) = Asech(BX), don<strong>de</strong> A y B son constantes a <strong>de</strong>terminar. En efecto,<br />
∂XR =<br />
=<br />
<br />
−1<br />
A∂X cosh (BX)<br />
−2<br />
−AB∂X cosh (BX) · s<strong>en</strong>h (BX)<br />
(2.93)<br />
(2.94)<br />
= −AB tanh (BX) · sech(BX) (2.95)<br />
22


