

N 33 V 72 Final

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
TAMAYO-LOEZA, E.J., MEZQUITA-MARTÍNEZ, R.S., NOVELO-CETINA, E., MAY-CEN, I.J. Y GARCÍA-CORTÉS, J.Z.<br />
voltaje de ese mismo Pin es de 0v, el giro será en sentido<br />
horario.<br />
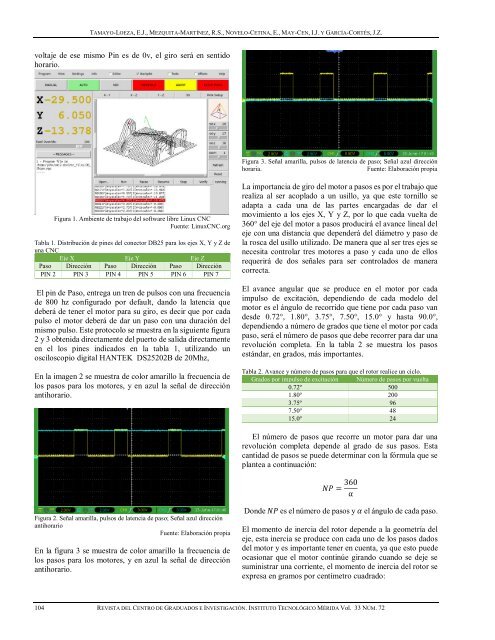
Figura 3. Señal amarilla, pulsos de latencia de paso; Señal azul dirección<br />
horaria.<br />
Fuente: Elaboración propia<br />
Figura 1. Ambiente de trabajo del software libre Linux CNC<br />
Fuente: LinuxCNC.org<br />
Tabla 1. Distribución de pines del conector DB25 para los ejes X, Y y Z de<br />
una CNC<br />
Eje X Eje Y Eje Z<br />
Paso Dirección Paso Dirección Paso Dirección<br />
PIN 2 PIN 3 PIN 4 PIN 5 PIN 6 PIN 7<br />
El pin de Paso, entrega un tren de pulsos con una frecuencia<br />
de 800 hz configurado por default, dando la latencia que<br />
deberá de tener el motor para su giro, es decir que por cada<br />
pulso el motor deberá de dar un paso con una duración del<br />
mismo pulso. Este protocolo se muestra en la siguiente figura<br />
2 y 3 obtenida directamente del puerto de salida directamente<br />
en el los pines indicados en la tabla 1, utilizando un<br />
osciloscopio digital HANTEK DS25202B de 20Mhz,<br />
En la imagen 2 se muestra de color amarillo la frecuencia de<br />
los pasos para los motores, y en azul la señal de dirección<br />
antihorario.<br />
La importancia de giro del motor a pasos es por el trabajo que<br />
realiza al ser acoplado a un usillo, ya que este tornillo se<br />
adapta a cada una de las partes encargadas de dar el<br />
movimiento a los ejes X, Y y Z, por lo que cada vuelta de<br />
360° del eje del motor a pasos producirá el avance lineal del<br />
eje con una distancia que dependerá del diámetro y paso de<br />
la rosca del usillo utilizado. De manera que al ser tres ejes se<br />
necesita controlar tres motores a paso y cada uno de ellos<br />
requerirá de dos señales para ser controlados de manera<br />
correcta.<br />
El avance angular que se produce en el motor por cada<br />
impulso de excitación, dependiendo de cada modelo del<br />
motor es el ángulo de recorrido que tiene por cada paso van<br />
desde 0.<strong>72</strong>°, 1.80°, 3.75°, 7.50°, 15.0° y hasta 90.0°,<br />
dependiendo a número de grados que tiene el motor por cada<br />
paso, será el número de pasos que debe recorrer para dar una<br />
revolución completa. En la tabla 2 se muestra los pasos<br />
estándar, en grados, más importantes.<br />
Tabla 2. Avance y número de pasos para que el rotor realice un ciclo.<br />
Grados por impulso de excitación Número de pasos por vuelta<br />
0.<strong>72</strong>º 500<br />
1.80º 200<br />
3.75º 96<br />
7.50º 48<br />
15.0º 24<br />
El número de pasos que recorre un motor para dar una<br />
revolución completa depende al grado de sus pasos. Esta<br />
cantidad de pasos se puede determinar con la fórmula que se<br />
plantea a continuación:<br />
NP = 360<br />
α<br />
Figura 2. Señal amarilla, pulsos de latencia de paso; Señal azul dirección<br />
antihorario<br />
Fuente: Elaboración propia<br />
En la figura 3 se muestra de color amarillo la frecuencia de<br />
los pasos para los motores, y en azul la señal de dirección<br />
antihorario.<br />
Donde NP es el número de pasos y α el ángulo de cada paso.<br />
El momento de inercia del rotor depende a la geometría del<br />
eje, esta inercia se produce con cada uno de los pasos dados<br />
del motor y es importante tener en cuenta, ya que esto puede<br />
ocasionar que el motor continúe girando cuando se deje se<br />
suministrar una corriente, el momento de inercia del rotor se<br />
expresa en gramos por centímetro cuadrado:<br />
104 REVISTA DEL CENTRO DE GRADUADOS E INVESTIGACIÓN. INSTITUTO TECNOLÓGICO MÉRIDA Vol. <strong>33</strong> NÚM. <strong>72</strong>














