


You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
62 CHAPITRE 4. GÉOMÉTRIE DANS L’ESPACE<br />
Pour cela, il reste de nombreux choix supplémentaires à faire et de problèmes auxiliaires à<br />
résoudre.<br />
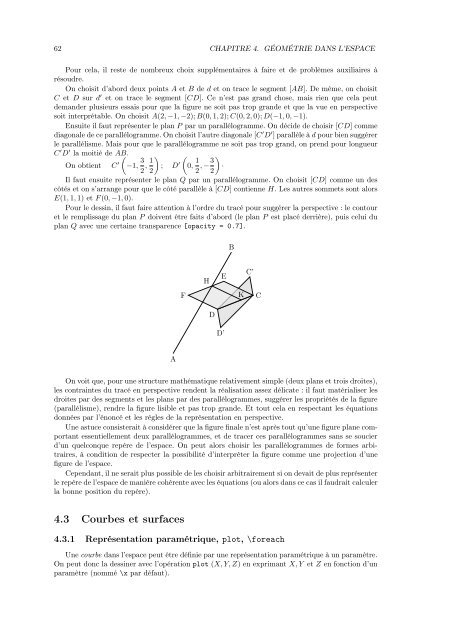
On choisit d’abord deux points A et B de d et on trace le segment [AB]. Demême,onchoisit<br />
C et D sur d 0 et on trace le segment [CD]. Ce n’est pas grand chose, mais rien que cela peut<br />
demander plusieurs essais pour que la figure ne soit pas trop grande et que la vue en perspective<br />
soit interprétable. On choisit A(2, 1, 2); B(0, 1, 2); C(0, 2, 0); D( 1, 0, 1).<br />
Ensuite il faut représenter le plan P par un parallélogramme. On décide de choisir [CD] comme<br />
diagonale de ce parallélogramme. On choisit l’autre diagonale [C 0 D 0 ] parallèle à d pour bien suggérer<br />
le parallélisme. Mais pour que le parallélogramme ne soit pas trop grand, on prend pour longueur<br />
C 0 D 0 la moitié de AB. ✓<br />
On obtient C 0 1, 3 2 , 1 ◆ ✓<br />
; D 0 0, 1 ◆<br />
2<br />
2 , 3<br />
·<br />
2<br />
Il faut ensuite représenter le plan Q par un parallélogramme. On choisit [CD] comme un des<br />
côtés et on s’arrange pour que le côté parallèle à [CD] contienne H. Lesautressommetssontalors<br />
E(1, 1, 1) et F (0, 1, 0).<br />
Pour le dessin, il faut faire attention à l’ordre du tracé pour suggérer la perspective : le contour<br />
et le remplissage du plan P doivent être faits d’abord (le plan P est placé derrière), puis celui du<br />
plan Q avec une certaine transparence [opacity = 0.7].<br />
B<br />
F<br />
H<br />
D<br />
E<br />
D’<br />
K<br />
C’<br />
C<br />
A<br />
On voit que, pour une structure mathématique relativement simple (deux plans et trois droites),<br />
les contraintes du tracé en perspective rendent la réalisation assez délicate : il faut matérialiser les<br />
droites par des segments et les plans par des parallélogrammes, suggérer les propriétés de la figure<br />
(parallélisme), rendre la figure lisible et pas trop grande. Et tout cela en respectant les équations<br />
données par l’énoncé et les règles de la représentation en perspective.<br />
Une astuce consisterait à considérer que la figure finale n’est après tout qu’une figure plane comportant<br />
essentiellement deux parallélogrammes, et de tracer ces parallélogrammes sans se soucier<br />
d’un quelconque repère de l’espace. On peut alors choisir les parallélogrammes de formes arbitraires,<br />
à condition de respecter la possibilité d’interpréter la figure comme une projection d’une<br />
figure de l’espace.<br />
Cependant, il ne serait plus possible de les choisir arbitrairement si on devait de plus représenter<br />
le repère de l’espace de manière cohérente avec les équations (ou alors dans ce cas il faudrait calculer<br />
la bonne position du repère).<br />
4.3 Courbes et surfaces<br />
4.3.1 Représentation paramétrique, plot, \foreach<br />
Une courbe dans l’espace peut être définie par une représentation paramétrique à un paramètre.<br />
On peut donc la dessiner avec l’opération plot (X, Y, Z) en exprimant X, Y et Z en fonction d’un<br />
paramètre (nommé \x par défaut).