Skript
Skript
Skript

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
1.3 Umparametrisierungen und Bogenlänge<br />
Der Geschwindigkeitsvektor der Helix lautet c ′ (t) = (− sin(t), cos(t), 1). Auch hier sieht man,<br />
dass die Helix regulär parametrisiert ist, da der letzte Eintrag des Geschwindigkeitsvektors immer<br />
konstant 1 ist.<br />
Das Beispiel 1.1 des Kreises zeigt, dass eine regulär parametrisierte Kurve nicht unbedingt injektiv sein<br />
muss. Man kann die Injektivität aber nach Einschränkung auf ein kleines Intervall fordern. Darauf kommen<br />
wir nochmals zu sprechen, wenn wir den Begriff von „einfach geschlossen“ einführen und motivieren<br />
werden.<br />
1.3 Umparametrisierungen und Bogenlänge<br />
In diesem Abschnitt wollen wir den Begriff der Bogenlänge teils einführen und teils voraussetzen und<br />
uns klar machen, was es bedeutet, wenn eine Kurve nach Bogenlänge parametrisiert ist. Wir widmen<br />
dem Begriff einen ganzen Abschnitt, da dieser für die Berechnung der Länge einer Kurve angenehme<br />
Konsequenzen hat, wie wir im nächsten Kapitel sehen werden. Zuvor müssen wir aber noch ein paar<br />
andere Dinge definieren.<br />
Eine Kurve c : I ⊂ R → R n ist die Punktmenge c(I) ⊂ R n zusammen mit seiner Parametrisierung.<br />
Diese Parametrisierung gibt an, wie c(I) durchlaufen werden soll. Wir haben schon gesehen, dass man<br />
zum Beispiel eine Gerade auf vielerlei Arte parametrisieren kann, ohne das Bild zu ändern!<br />
Häufig möchte man die Parametrisierung ändern und dabei die Bildkurve aber so belassen, wie sie ist.<br />
Hierfür definieren wir:<br />
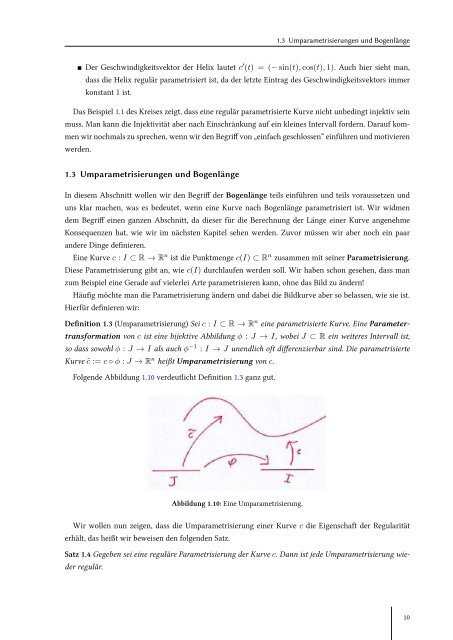
Definition 1.3 (Umparametrisierung) Sei c : I ⊂ R → R n eine parametrisierte Kurve. Eine Parametertransformation<br />
von c ist eine bijektive Abbildung φ : J → I, wobei J ⊂ R ein weiteres Intervall ist,<br />
so dass sowohl φ : J → I als auch φ −1 : I → J unendlich oft differenzierbar sind. Die parametrisierte<br />
Kurve ˜c := c ∘ φ : J → R n heißt Umparametrisierung von c.<br />
Folgende Abbildung 1.10 verdeutlicht Definition 1.3 ganz gut.<br />
Abbildung 1.10: Eine Umparametrisierung.<br />
Wir wollen nun zeigen, dass die Umparametrisierung einer Kurve c die Eigenschaft der Regularität<br />
erhält, das heißt wir beweisen den folgenden Satz.<br />
Satz 1.4 Gegeben sei eine reguläre Parametrisierung der Kurve c. Dann ist jede Umparametrisierung wieder<br />
regulär.<br />
10