Skript
Skript
Skript

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
3.2 Krümmung ebener Kurven<br />
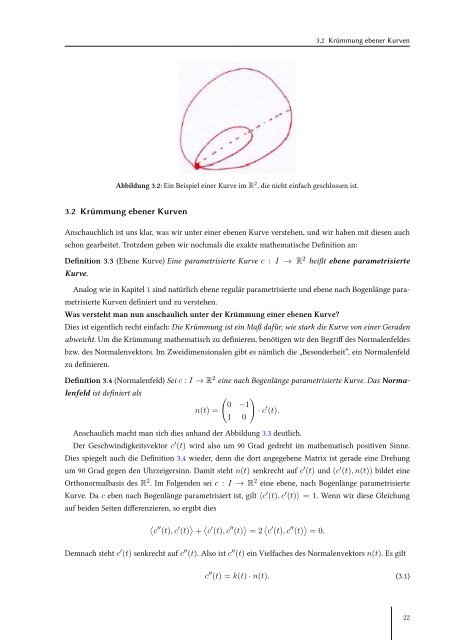
Abbildung 3.2: Ein Beispiel einer Kurve im R 2 , die nicht einfach geschlossen ist.<br />
3.2 Krümmung ebener Kurven<br />
Anschauchlich ist uns klar, was wir unter einer ebenen Kurve verstehen, und wir haben mit diesen auch<br />
schon gearbeitet. Trotzdem geben wir nochmals die exakte mathematische Definition an:<br />
Definition 3.3 (Ebene Kurve) Eine parametrisierte Kurve c : I → R 2 heißt ebene parametrisierte<br />
Kurve.<br />
Analog wie in Kapitel 1 sind natürlich ebene regulär parametrisierte und ebene nach Bogenlänge parametrisierte<br />
Kurven definiert und zu verstehen.<br />
Was versteht man nun anschaulich unter der Krümmung einer ebenen Kurve?<br />
Dies ist eigentlich recht einfach: Die Krümmung ist ein Maß dafür, wie stark die Kurve von einer Geraden<br />
abweicht. Um die Krümmung mathematisch zu definieren, benötigen wir den Begriff des Normalenfeldes<br />
bzw. des Normalenvektors. Im Zweidimensionalen gibt es nämlich die „Besonderheit“, ein Normalenfeld<br />
zu definieren.<br />
Definition 3.4 (Normalenfeld) Sei c : I → R 2 eine nach Bogenlänge parametrisierte Kurve. Das Normalenfeld<br />
ist definiert als<br />
( )<br />
0 −1<br />
n(t) = ⋅ c ′ (t).<br />
1 0<br />
Anschaulich macht man sich dies anhand der Abbildung 3.3 deutlich.<br />
Der Geschwindigkeitsvektor c ′ (t) wird also um 90 Grad gedreht im mathematisch positiven Sinne.<br />
Dies spiegelt auch die Definition 3.4 wieder, denn die dort angegebene Matrix ist gerade eine Drehung<br />
um 90 Grad gegen den Uhrzeigersinn. Damit steht n(t) senkrecht auf c ′ (t) und (c ′ (t), n(t)) bildet eine<br />
Orthonormalbasis des R 2 . Im Folgenden sei c : I → R 2 eine ebene, nach Bogenlänge parametrisierte<br />
Kurve. Da c eben nach Bogenlänge parametrisiert ist, gilt ⟨c ′ (t), c ′ (t)⟩ = 1. Wenn wir diese Gleichung<br />
auf beiden Seiten differenzieren, so ergibt dies<br />
〈<br />
c ′′ (t), c ′ (t) 〉 + 〈 c ′ (t), c ′′ (t) 〉 = 2 〈 c ′ (t), c ′′ (t) 〉 = 0.<br />
Demnach steht c ′ (t) senkrecht auf c ′′ (t). Also ist c ′′ (t) ein Vielfaches des Normalenvektors n(t). Es gilt<br />
c ′′ (t) = k(t) ⋅ n(t). (3.1)<br />
22