

Prüfingenieur 31 - BVPI - Bundesvereinigung der Prüfingenieure ...
Prüfingenieur 31 - BVPI - Bundesvereinigung der Prüfingenieure ...
Prüfingenieur 31 - BVPI - Bundesvereinigung der Prüfingenieure ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
jektives, <strong>der</strong> Gegenstandsweite, den Belichtungsverhältnissen<br />
(Störlicht), den Linsenfehlern des optischen<br />
Systems und <strong>der</strong> Fertigungsqualität des CCD-<br />
Rasters. Als Ergebnis erhält man ein zweidimensionales<br />
Raster von Messpunkten (Abb. 5), die Pixel genannt<br />
werden und die die Ausgangsbasis für jede<br />
weitere Untersuchung bilden [6, 7, 8].<br />
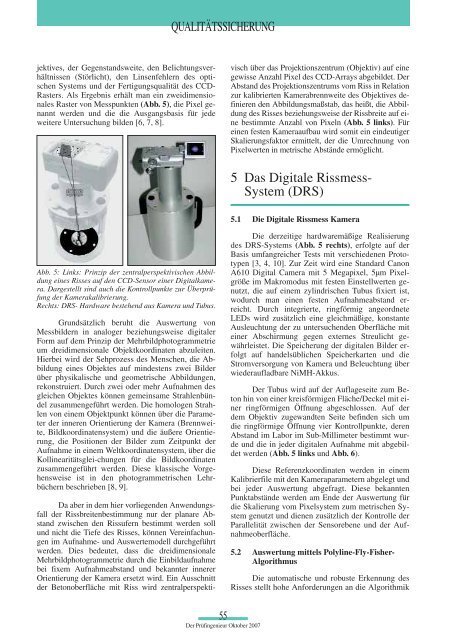
Abb. 5: Links: Prinzip <strong>der</strong> zentralperspektivischen Abbildung<br />
eines Risses auf den CCD-Sensor einer Digitalkamera.<br />
Dargestellt sind auch die Kontrollpunkte zur Überprüfung<br />
<strong>der</strong> Kamerakalibrierung.<br />
Rechts: DRS- Hardware bestehend aus Kamera und Tubus.<br />
Grundsätzlich beruht die Auswertung von<br />
Messbil<strong>der</strong>n in analoger beziehungsweise digitaler<br />
Form auf dem Prinzip <strong>der</strong> Mehrbildphotogrammetrie<br />
um dreidimensionale Objektkoordinaten abzuleiten.<br />
Hierbei wird <strong>der</strong> Sehprozess des Menschen, die Abbildung<br />
eines Objektes auf mindestens zwei Bil<strong>der</strong><br />
über physikalische und geometrische Abbildungen,<br />
rekonstruiert. Durch zwei o<strong>der</strong> mehr Aufnahmen des<br />
gleichen Objektes können gemeinsame Strahlenbündel<br />
zusammengeführt werden. Die homologen Strahlen<br />
von einem Objektpunkt können über die Parameter<br />
<strong>der</strong> inneren Orientierung <strong>der</strong> Kamera (Brennweite,<br />
Bildkoordinatensystem) und die äußere Orientierung,<br />
die Positionen <strong>der</strong> Bil<strong>der</strong> zum Zeitpunkt <strong>der</strong><br />
Aufnahme in einem Weltkoordinatensystem, über die<br />
Kollinearitätsglei-chungen für die Bildkoordinaten<br />
zusammengeführt werden. Diese klassische Vorgehensweise<br />
ist in den photogrammetrischen Lehrbüchern<br />
beschrieben [8, 9].<br />
Da aber in dem hier vorliegenden Anwendungsfall<br />
<strong>der</strong> Rissbreitenbestimmung nur <strong>der</strong> planare Abstand<br />
zwischen den Rissufern bestimmt werden soll<br />
und nicht die Tiefe des Risses, können Vereinfachungen<br />
im Aufnahme- und Auswertemodell durchgeführt<br />
werden. Dies bedeutet, dass die dreidimensionale<br />
Mehrbildphotogrammetrie durch die Einbildaufnahme<br />
bei fixem Aufnahmeabstand und bekannter innerer<br />
Orientierung <strong>der</strong> Kamera ersetzt wird. Ein Ausschnitt<br />
<strong>der</strong> Betonoberfläche mit Riss wird zentralperspekti-<br />
QUALITÄTSSICHERUNG<br />
55<br />
Der <strong>Prüfingenieur</strong> Oktober 2007<br />
visch über das Projektionszentrum (Objektiv) auf eine<br />
gewisse Anzahl Pixel des CCD-Arrays abgebildet. Der<br />
Abstand des Projektionszentrums vom Riss in Relation<br />
zur kalibrierten Kamerabrennweite des Objektives definieren<br />
den Abbildungsmaßstab, das heißt, die Abbildung<br />
des Risses beziehungsweise <strong>der</strong> Rissbreite auf eine<br />
bestimmte Anzahl von Pixeln (Abb. 5 links). Für<br />
einen festen Kameraaufbau wird somit ein eindeutiger<br />
Skalierungsfaktor ermittelt, <strong>der</strong> die Umrechnung von<br />
Pixelwerten in metrische Abstände ermöglicht.<br />
5 Das Digitale Rissmess-<br />
System (DRS)<br />
5.1 Die Digitale Rissmess Kamera<br />
Die <strong>der</strong>zeitige hardwaremäßige Realisierung<br />
des DRS-Systems (Abb. 5 rechts), erfolgte auf <strong>der</strong><br />
Basis umfangreicher Tests mit verschiedenen Prototypen<br />
[3, 4, 10]. Zur Zeit wird eine Standard Canon<br />
A610 Digital Camera mit 5 Megapixel, 5µm Pixelgröße<br />
im Makromodus mit festen Einstellwerten genutzt,<br />
die auf einem zylindrischen Tubus fixiert ist,<br />
wodurch man einen festen Aufnahmeabstand erreicht.<br />
Durch integrierte, ringförmig angeordnete<br />
LEDs wird zusätzlich eine gleichmäßige, konstante<br />
Ausleuchtung <strong>der</strong> zu untersuchenden Oberfläche mit<br />
einer Abschirmung gegen externes Streulicht gewährleistet.<br />
Die Speicherung <strong>der</strong> digitalen Bil<strong>der</strong> erfolgt<br />
auf handelsüblichen Speicherkarten und die<br />
Stromversorgung von Kamera und Beleuchtung über<br />
wie<strong>der</strong>aufladbare NiMH-Akkus.<br />
Der Tubus wird auf <strong>der</strong> Auflageseite zum Beton<br />
hin von einer kreisförmigen Fläche/Deckel mit einer<br />
ringförmigen Öffnung abgeschlossen. Auf <strong>der</strong><br />
dem Objektiv zugewandten Seite befinden sich um<br />
die ringförmige Öffnung vier Kontrollpunkte, <strong>der</strong>en<br />
Abstand im Labor im Sub-Millimeter bestimmt wurde<br />
und die in je<strong>der</strong> digitalen Aufnahme mit abgebildet<br />
werden (Abb. 5 links und Abb. 6).<br />
Diese Referenzkoordinaten werden in einem<br />
Kalibrierfile mit den Kameraparametern abgelegt und<br />
bei je<strong>der</strong> Auswertung abgefragt. Diese bekannten<br />
Punktabstände werden am Ende <strong>der</strong> Auswertung für<br />
die Skalierung vom Pixelsystem zum metrischen System<br />
genutzt und dienen zusätzlich <strong>der</strong> Kontrolle <strong>der</strong><br />
Parallelität zwischen <strong>der</strong> Sensorebene und <strong>der</strong> Aufnahmeoberfläche.<br />
5.2 Auswertung mittels Polyline-Fly-Fisher-<br />
Algorithmus<br />
Die automatische und robuste Erkennung des<br />
Risses stellt hohe Anfor<strong>der</strong>ungen an die Algorithmik













