

Prüfingenieur 31 - BVPI - Bundesvereinigung der Prüfingenieure ...
Prüfingenieur 31 - BVPI - Bundesvereinigung der Prüfingenieure ...
Prüfingenieur 31 - BVPI - Bundesvereinigung der Prüfingenieure ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
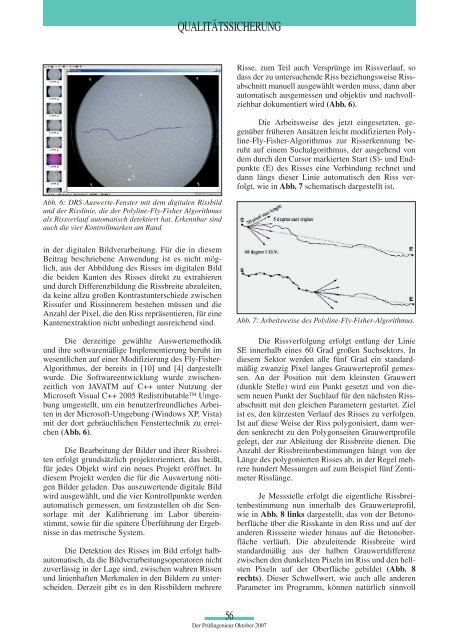
Abb. 6: DRS-Auswerte-Fenster mit dem digitalen Rissbild<br />
und <strong>der</strong> Risslinie, die <strong>der</strong> Polyline-Fly-Fisher Algorithmus<br />
als Rissverlauf automatisch detektiert hat. Erkennbar sind<br />
auch die vier Kontrollmarken am Rand<br />
in <strong>der</strong> digitalen Bildverarbeitung. Für die in diesem<br />
Beitrag beschriebene Anwendung ist es nicht möglich,<br />
aus <strong>der</strong> Abbildung des Risses im digitalen Bild<br />
die beiden Kanten des Risses direkt zu extrahieren<br />
und durch Differenzbildung die Rissbreite abzuleiten,<br />
da keine allzu großen Kontrastunterschiede zwischen<br />
Rissufer und Rissinnerem bestehen müssen und die<br />
Anzahl <strong>der</strong> Pixel, die den Riss repräsentieren, für eine<br />
Kantenextraktion nicht unbedingt ausreichend sind.<br />
Die <strong>der</strong>zeitige gewählte Auswertemethodik<br />
und ihre softwaremäßige Implementierung beruht im<br />
wesentlichen auf einer Modifizierung des Fly-Fisher-<br />
Algorithmus, <strong>der</strong> bereits in [10] und [4] dargestellt<br />
wurde. Die Softwareentwicklung wurde zwischenzeitlich<br />
von JAVATM auf C++ unter Nutzung <strong>der</strong><br />
Microsoft Visual C++ 2005 Redistributable Umgebung<br />
umgestellt, um ein benutzerfreundliches Arbeiten<br />
in <strong>der</strong> Microsoft-Umgebung (Windows XP, Vista)<br />
mit <strong>der</strong> dort gebräuchlichen Fenstertechnik zu erreichen<br />
(Abb. 6).<br />
Die Bearbeitung <strong>der</strong> Bil<strong>der</strong> und ihrer Rissbreiten<br />
erfolgt grundsätzlich projektorientiert, das heißt,<br />
für jedes Objekt wird ein neues Projekt eröffnet. In<br />
diesem Projekt werden die für die Auswertung nötigen<br />
Bil<strong>der</strong> geladen. Das auszuwertende digitale Bild<br />
wird ausgewählt, und die vier Kontrollpunkte werden<br />
automatisch gemessen, um festzustellen ob die Sensorlage<br />
mit <strong>der</strong> Kalibrierung im Labor übereinstimmt,<br />
sowie für die spätere Überführung <strong>der</strong> Ergebnisse<br />
in das metrische System.<br />
Die Detektion des Risses im Bild erfolgt halbautomatisch,<br />
da die Bildverarbeitungsoperatoren nicht<br />
zuverlässig in <strong>der</strong> Lage sind, zwischen wahren Rissen<br />
und linienhaften Merkmalen in den Bil<strong>der</strong>n zu unterscheiden.<br />
Derzeit gibt es in den Rissbil<strong>der</strong>n mehrere<br />
QUALITÄTSSICHERUNG<br />
56<br />
Der <strong>Prüfingenieur</strong> Oktober 2007<br />
Risse, zum Teil auch Versprünge im Rissverlauf, so<br />
dass <strong>der</strong> zu untersuchende Riss beziehungsweise Rissabschnitt<br />
manuell ausgewählt werden muss, dann aber<br />
automatisch ausgemessen und objektiv und nachvollziehbar<br />
dokumentiert wird (Abb. 6).<br />
Die Arbeitsweise des jetzt eingesetzten, gegenüber<br />
früheren Ansätzen leicht modifizierten Polyline-Fly-Fisher-Algorithmus<br />
zur Risserkennung beruht<br />
auf einem Suchalgorithmus, <strong>der</strong> ausgehend von<br />
dem durch den Cursor markierten Start (S)- und Endpunkte<br />
(E) des Risses eine Verbindung rechnet und<br />
dann längs dieser Linie automatisch den Riss verfolgt,<br />
wie in Abb. 7 schematisch dargestellt ist.<br />
Abb. 7: Arbeitsweise des Polyline-Fly-Fisher-Algorithmus.<br />
Die Rissverfolgung erfolgt entlang <strong>der</strong> Linie<br />
SE innerhalb eines 60 Grad großen Suchsektors. In<br />
diesem Sektor werden alle fünf Grad ein standardmäßig<br />
zwanzig Pixel langes Grauwerteprofil gemessen.<br />
An <strong>der</strong> Position mit dem kleinsten Grauwert<br />
(dunkle Stelle) wird ein Punkt gesetzt und von diesem<br />
neuen Punkt <strong>der</strong> Suchlauf für den nächsten Rissabschnitt<br />
mit den gleichen Parametern gestartet. Ziel<br />
ist es, den kürzesten Verlauf des Risses zu verfolgen.<br />
Ist auf diese Weise <strong>der</strong> Riss polygonisiert, dann werden<br />
senkrecht zu den Polygonseiten Grauwertprofile<br />
gelegt, <strong>der</strong> zur Ableitung <strong>der</strong> Rissbreite dienen. Die<br />
Anzahl <strong>der</strong> Rissbreitenbestimmungen hängt von <strong>der</strong><br />
Länge des polygonierten Risses ab, in <strong>der</strong> Regel mehrere<br />
hun<strong>der</strong>t Messungen auf zum Beispiel fünf Zentimeter<br />
Risslänge.<br />
Je Messstelle erfolgt die eigentliche Rissbreitenbestimmung<br />
nun innerhalb des Grauwerteprofil,<br />
wie in Abb. 8 links dargestellt, das von <strong>der</strong> Betonoberfläche<br />
über die Risskante in den Riss und auf <strong>der</strong><br />
an<strong>der</strong>en Rissseite wie<strong>der</strong> hinaus auf die Betonoberfläche<br />
verläuft. Die abzuleitende Rissbreite wird<br />
standardmäßig aus <strong>der</strong> halben Grauwertdifferenz<br />
zwischen den dunkelsten Pixeln im Riss und den hellsten<br />
Pixeln auf <strong>der</strong> Oberfläche gebildet (Abb. 8<br />
rechts). Dieser Schwellwert, wie auch alle an<strong>der</strong>en<br />
Parameter im Programm, können natürlich sinnvoll













