Compact / CANmotion /Motion Controller ... - Schneider Electric
Compact / CANmotion /Motion Controller ... - Schneider Electric
Compact / CANmotion /Motion Controller ... - Schneider Electric

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
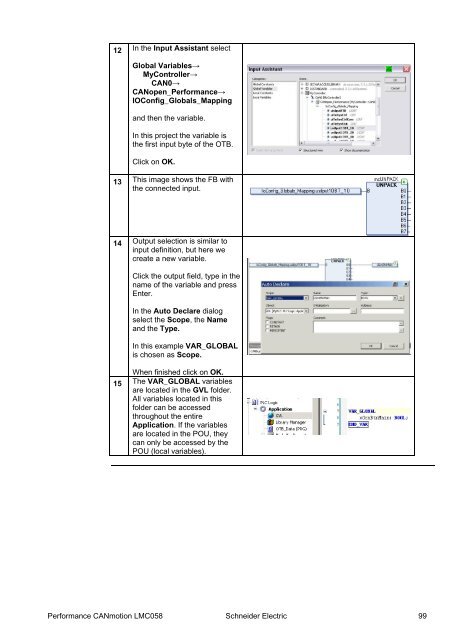
12 In the Input Assistant select<br />
Global Variables→<br />
My<strong>Controller</strong>→<br />
CAN0→<br />
CANopen_Performance→<br />
IOConfig_Globals_Mapping<br />
and then the variable.<br />
In this project the variable is<br />
the first input byte of the OTB.<br />
Click on OK.<br />
13 This image shows the FB with<br />
the connected input.<br />
14 Output selection is similar to<br />
input definition, but here we<br />
create a new variable.<br />
Click the output field, type in the<br />
name of the variable and press<br />
Enter.<br />
In the Auto Declare dialog<br />
select the Scope, the Name<br />
and the Type.<br />
In this example VAR_GLOBAL<br />
is chosen as Scope.<br />
When finished click on OK.<br />
15 The VAR_GLOBAL variables<br />
are located in the GVL folder.<br />
All variables located in this<br />
folder can be accessed<br />
throughout the entire<br />
Application. If the variables<br />
are located in the POU, they<br />
can only be accessed by the<br />
POU (local variables).<br />
Performance <strong>CANmotion</strong> LMC058 <strong>Schneider</strong> <strong>Electric</strong> 99