El espacio: De EuclÃdes a Einstein Roy McWeeny
El espacio: De EuclÃdes a Einstein Roy McWeeny
El espacio: De EuclÃdes a Einstein Roy McWeeny

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
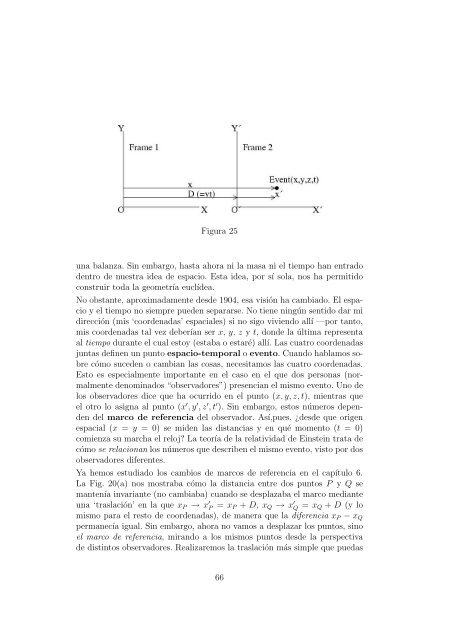
Figura 25<br />
una balanza. Sin embargo, hasta ahora ni la masa ni el tiempo han entrado<br />
dentro de nuestra idea de <strong>espacio</strong>. Esta idea, por sí sola, nos ha permitido<br />
construir toda la geometría euclídea.<br />
No obstante, aproximadamente desde 1904, esa visión ha cambiado. <strong>El</strong> <strong>espacio</strong><br />
y el tiempo no siempre pueden separarse. No tiene ningún sentido dar mi<br />
dirección (mis ‘coordenadas’ espaciales) si no sigo viviendo allí —por tanto,<br />
mis coordenadas tal vez deberían ser x, y, z y t, donde la última representa<br />
al tiempo durante el cual estoy (estaba o estaré) allí. Las cuatro coordenadas<br />
juntas definen un punto <strong>espacio</strong>-temporal o evento. Cuando hablamos sobre<br />
cómo suceden o cambian las cosas, necesitamos las cuatro coordenadas.<br />
Esto es especialmente importante en el caso en el que dos personas (normalmente<br />
denominados “observadores”) presencian el mismo evento. Uno de<br />
los observadores dice que ha ocurrido en el punto (x, y, z, t), mientras que<br />
el otro lo asigna al punto (x ′ ,y ′ ,z ′ ,t ′ ). Sin embargo, estos números dependen<br />
del marco de referencia del observador. Así,pues, ¿desde que origen<br />
espacial (x = y = 0) se miden las distancias y en qué momento (t =0)<br />
comienza su marcha el reloj? La teoría de la relatividad de <strong>Einstein</strong> trata de<br />
cómo se relacionan los números que describen el mismo evento, visto por dos<br />
observadores diferentes.<br />
Ya hemos estudiado los cambios de marcos de referencia en el capítulo 6.<br />
La Fig. 20(a) nos mostraba cómo la distancia entre dos puntos P y Q se<br />
mantenía invariante (no cambiaba) cuando se desplazaba el marco mediante<br />
una ‘traslación’ en la que x P → x ′ P = x P + D, x Q → x ′ Q = x Q + D (y lo<br />
mismo para el resto de coordenadas), de manera que la diferencia x P − x Q<br />
permanecía igual. Sin embargo, ahora no vamos a desplazar los puntos, sino<br />
el marco de referencia, mirando a los mismos puntos desde la perspectiva<br />
de distintos observadores. Realizaremos la traslación más simple que puedas<br />
66