Rapport de stage - Pages perso - LCPC
Rapport de stage - Pages perso - LCPC
Rapport de stage - Pages perso - LCPC

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Projet <strong>de</strong> Fin d'Etu<strong>de</strong>s <strong>de</strong> Noémie VANETTI Septembre 2008<br />
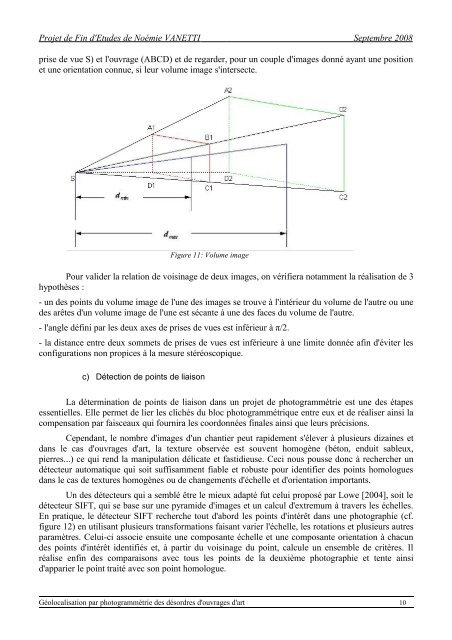
prise <strong>de</strong> vue S) et l'ouvrage (ABCD) et <strong>de</strong> regar<strong>de</strong>r, pour un couple d'images donné ayant une position<br />
et une orientation connue, si leur volume image s'intersecte.<br />
Figure 11: Volume image<br />
Pour vali<strong>de</strong>r la relation <strong>de</strong> voisinage <strong>de</strong> <strong>de</strong>ux images, on vérifiera notamment la réalisation <strong>de</strong> 3<br />
hypothèses :<br />
- un <strong>de</strong>s points du volume image <strong>de</strong> l'une <strong>de</strong>s images se trouve à l'intérieur du volume <strong>de</strong> l'autre ou une<br />
<strong>de</strong>s arêtes d'un volume image <strong>de</strong> l'une est sécante à une <strong>de</strong>s faces du volume <strong>de</strong> l'autre.<br />
- l'angle défini par les <strong>de</strong>ux axes <strong>de</strong> prises <strong>de</strong> vues est inférieur à π/2.<br />
- la distance entre <strong>de</strong>ux sommets <strong>de</strong> prises <strong>de</strong> vues est inférieure à une limite donnée afin d'éviter les<br />
configurations non propices à la mesure stéréoscopique.<br />
c) Détection <strong>de</strong> points <strong>de</strong> liaison<br />
La détermination <strong>de</strong> points <strong>de</strong> liaison dans un projet <strong>de</strong> photogrammétrie est une <strong>de</strong>s étapes<br />
essentielles. Elle permet <strong>de</strong> lier les clichés du bloc photogrammétrique entre eux et <strong>de</strong> réaliser ainsi la<br />
compensation par faisceaux qui fournira les coordonnées finales ainsi que leurs précisions.<br />
Cependant, le nombre d'images d'un chantier peut rapi<strong>de</strong>ment s'élever à plusieurs dizaines et<br />
dans le cas d'ouvrages d'art, la texture observée est souvent homogène (béton, enduit sableux,<br />
pierres...) ce qui rend la manipulation délicate et fastidieuse. Ceci nous pousse donc à rechercher un<br />
détecteur automatique qui soit suffisamment fiable et robuste pour i<strong>de</strong>ntifier <strong>de</strong>s points homologues<br />
dans le cas <strong>de</strong> textures homogènes ou <strong>de</strong> changements d'échelle et d'orientation importants.<br />
Un <strong>de</strong>s détecteurs qui a semblé être le mieux adapté fut celui proposé par Lowe [2004], soit le<br />
détecteur SIFT, qui se base sur une pyrami<strong>de</strong> d'images et un calcul d'extremum à travers les échelles.<br />
En pratique, le détecteur SIFT recherche tout d'abord les points d'intérêt dans une photographie (cf.<br />
figure 12) en utilisant plusieurs transformations faisant varier l'échelle, les rotations et plusieurs autres<br />
paramètres. Celui-ci associe ensuite une composante échelle et une composante orientation à chacun<br />
<strong>de</strong>s points d'intérêt i<strong>de</strong>ntifiés et, à partir du voisinage du point, calcule un ensemble <strong>de</strong> critères. Il<br />
réalise enfin <strong>de</strong>s comparaisons avec tous les points <strong>de</strong> la <strong>de</strong>uxième photographie et tente ainsi<br />
d'apparier le point traité avec son point homologue.<br />
Géolocalisation par photogrammétrie <strong>de</strong>s désordres d'ouvrages d'art 10