Rapport de stage - Pages perso - LCPC
Rapport de stage - Pages perso - LCPC
Rapport de stage - Pages perso - LCPC

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Projet <strong>de</strong> Fin d'Etu<strong>de</strong>s <strong>de</strong> Noémie VANETTI Septembre 2008<br />
D. Pré-traitements<br />
13) Coordonnées <strong>de</strong>s points levés<br />
On calcule grâce au logiciel GNSS Solution les<br />
coordonnées <strong>de</strong>s quatre points <strong>de</strong> calage utilisés<br />
pour le géoréférencement <strong>de</strong> l'image constituant<br />
le plan <strong>de</strong> vol du drone, cf. tableau 4.<br />
Point Longitu<strong>de</strong> (<strong>de</strong>g) Latitu<strong>de</strong> (<strong>de</strong>g)<br />
P1 -1,63745000 47,15540000<br />
P2 -1,63653333 47,15550000<br />
P3 -1,63673333 47,15680000<br />
P4 -1,63758333 47,15678333<br />
Tableau 4: Coordonnées WGS84 <strong>de</strong>s points <strong>de</strong> calage<br />
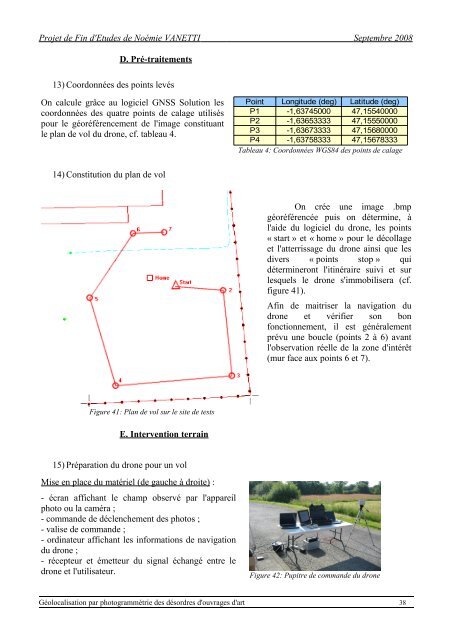
14) Constitution du plan <strong>de</strong> vol<br />
On crée une image .bmp<br />
géoréférencée puis on détermine, à<br />
l'ai<strong>de</strong> du logiciel du drone, les points<br />
« start » et « home » pour le décollage<br />
et l'atterrissage du drone ainsi que les<br />
divers « points stop » qui<br />
détermineront l'itinéraire suivi et sur<br />
lesquels le drone s'immobilisera (cf.<br />
figure 41).<br />
Afin <strong>de</strong> maitriser la navigation du<br />
drone et vérifier son bon<br />
fonctionnement, il est généralement<br />
prévu une boucle (points 2 à 6) avant<br />
l'observation réelle <strong>de</strong> la zone d'intérêt<br />
(mur face aux points 6 et 7).<br />
Figure 41: Plan <strong>de</strong> vol sur le site <strong>de</strong> tests<br />
E. Intervention terrain<br />
15) Préparation du drone pour un vol<br />
Mise en place du matériel (<strong>de</strong> gauche à droite) :<br />
- écran affichant le champ observé par l'appareil<br />
photo ou la caméra ;<br />
- comman<strong>de</strong> <strong>de</strong> déclenchement <strong>de</strong>s photos ;<br />
- valise <strong>de</strong> comman<strong>de</strong> ;<br />
- ordinateur affichant les informations <strong>de</strong> navigation<br />
du drone ;<br />
- récepteur et émetteur du signal échangé entre le<br />
drone et l'utilisateur.<br />
Figure 42: Pupitre <strong>de</strong> comman<strong>de</strong> du drone<br />
Géolocalisation par photogrammétrie <strong>de</strong>s désordres d'ouvrages d'art 38