Rapport de stage - Pages perso - LCPC
Rapport de stage - Pages perso - LCPC
Rapport de stage - Pages perso - LCPC

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Projet <strong>de</strong> Fin d'Etu<strong>de</strong>s <strong>de</strong> Noémie VANETTI Septembre 2008<br />
F. Traitement au bureau<br />
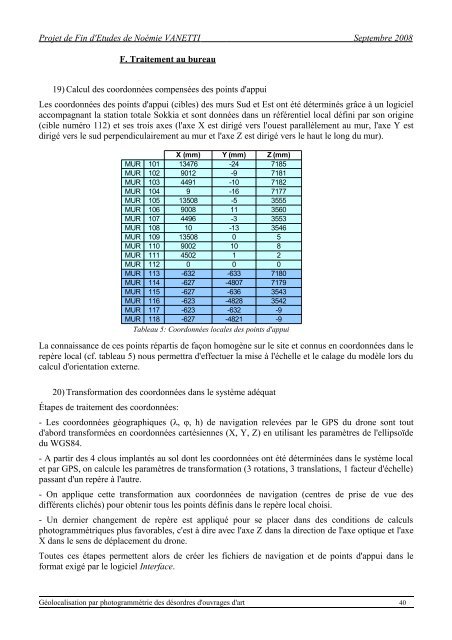
19) Calcul <strong>de</strong>s coordonnées compensées <strong>de</strong>s points d'appui<br />
Les coordonnées <strong>de</strong>s points d'appui (cibles) <strong>de</strong>s murs Sud et Est ont été déterminés grâce à un logiciel<br />
accompagnant la station totale Sokkia et sont données dans un référentiel local défini par son origine<br />
(cible numéro 112) et ses trois axes (l'axe X est dirigé vers l'ouest parallèlement au mur, l'axe Y est<br />
dirigé vers le sud perpendiculairement au mur et l'axe Z est dirigé vers le haut le long du mur).<br />
X (mm) Y (mm) Z (mm)<br />
MUR 101 13476 -24 7185<br />
MUR 102 9012 -9 7181<br />
MUR 103 4491 -10 7182<br />
MUR 104 9 -16 7177<br />
MUR 105 13508 -5 3555<br />
MUR 106 9008 11 3560<br />
MUR 107 4496 -3 3553<br />
MUR 108 10 -13 3546<br />
MUR 109 13508 0 5<br />
MUR 110 9002 10 8<br />
MUR 111 4502 1 2<br />
MUR 112 0 0 0<br />
MUR 113 -632 -633 7180<br />
MUR 114 -627 -4807 7179<br />
MUR 115 -627 -636 3543<br />
MUR 116 -623 -4828 3542<br />
MUR 117 -623 -632 -9<br />
MUR 118 -627 -4821 -9<br />
Tableau 5: Coordonnées locales <strong>de</strong>s points d'appui<br />
La connaissance <strong>de</strong> ces points répartis <strong>de</strong> façon homogène sur le site et connus en coordonnées dans le<br />
repère local (cf. tableau 5) nous permettra d'effectuer la mise à l'échelle et le calage du modèle lors du<br />
calcul d'orientation externe.<br />
20) Transformation <strong>de</strong>s coordonnées dans le système adéquat<br />
Étapes <strong>de</strong> traitement <strong>de</strong>s coordonnées:<br />
- Les coordonnées géographiques (λ, φ, h) <strong>de</strong> navigation relevées par le GPS du drone sont tout<br />
d'abord transformées en coordonnées cartésiennes (X, Y, Z) en utilisant les paramètres <strong>de</strong> l'ellipsoï<strong>de</strong><br />
du WGS84.<br />
- A partir <strong>de</strong>s 4 clous implantés au sol dont les coordonnées ont été déterminées dans le système local<br />
et par GPS, on calcule les paramètres <strong>de</strong> transformation (3 rotations, 3 translations, 1 facteur d'échelle)<br />
passant d'un repère à l'autre.<br />
- On applique cette transformation aux coordonnées <strong>de</strong> navigation (centres <strong>de</strong> prise <strong>de</strong> vue <strong>de</strong>s<br />
différents clichés) pour obtenir tous les points définis dans le repère local choisi.<br />
- Un <strong>de</strong>rnier changement <strong>de</strong> repère est appliqué pour se placer dans <strong>de</strong>s conditions <strong>de</strong> calculs<br />
photogrammétriques plus favorables, c'est à dire avec l'axe Z dans la direction <strong>de</strong> l'axe optique et l'axe<br />
X dans le sens <strong>de</strong> déplacement du drone.<br />
Toutes ces étapes permettent alors <strong>de</strong> créer les fichiers <strong>de</strong> navigation et <strong>de</strong> points d'appui dans le<br />
format exigé par le logiciel Interface.<br />
Géolocalisation par photogrammétrie <strong>de</strong>s désordres d'ouvrages d'art 40