Rapport de stage - Pages perso - LCPC
Rapport de stage - Pages perso - LCPC
Rapport de stage - Pages perso - LCPC

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Projet <strong>de</strong> Fin d'Etu<strong>de</strong>s <strong>de</strong> Noémie VANETTI Septembre 2008<br />
Afin <strong>de</strong> combiner ces <strong>de</strong>ux métho<strong>de</strong>s, plusieurs exigences ont donc été établies pour les<br />
chantiers <strong>de</strong> géolocalisation. On propose, pour garantir une bonne utilisation du drone ainsi que le bon<br />
fonctionnement du logiciel <strong>de</strong> traitement <strong>de</strong> données, <strong>de</strong> respecter les contraintes suivantes.<br />
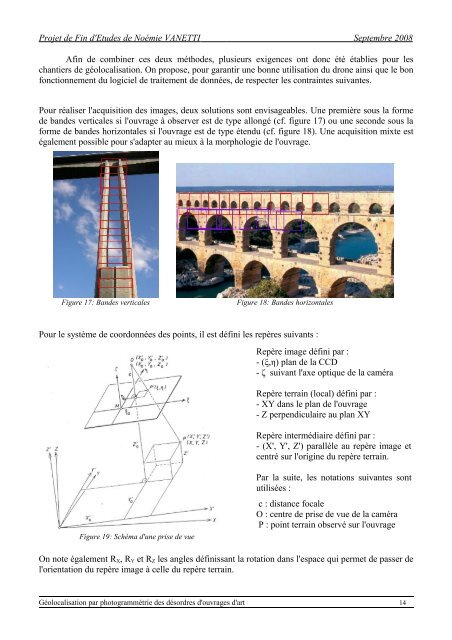
Pour réaliser l'acquisition <strong>de</strong>s images, <strong>de</strong>ux solutions sont envisageables. Une première sous la forme<br />
<strong>de</strong> ban<strong>de</strong>s verticales si l'ouvrage à observer est <strong>de</strong> type allongé (cf. figure 17) ou une secon<strong>de</strong> sous la<br />
forme <strong>de</strong> ban<strong>de</strong>s horizontales si l'ouvrage est <strong>de</strong> type étendu (cf. figure 18). Une acquisition mixte est<br />
également possible pour s'adapter au mieux à la morphologie <strong>de</strong> l'ouvrage.<br />
Figure 17: Ban<strong>de</strong>s verticales Figure 18: Ban<strong>de</strong>s horizontales<br />
Pour le système <strong>de</strong> coordonnées <strong>de</strong>s points, il est défini les repères suivants :<br />
Repère image défini par :<br />
- (ξ,η) plan <strong>de</strong> la CCD<br />
- ζ suivant l'axe optique <strong>de</strong> la caméra<br />
Repère terrain (local) défini par :<br />
- XY dans le plan <strong>de</strong> l'ouvrage<br />
- Z perpendiculaire au plan XY<br />
Repère intermédiaire défini par :<br />
- (X', Y', Z') parallèle au repère image et<br />
centré sur l'origine du repère terrain.<br />
Figure 19: Schéma d'une prise <strong>de</strong> vue<br />
Par la suite, les notations suivantes sont<br />
utilisées :<br />
c : distance focale<br />
O : centre <strong>de</strong> prise <strong>de</strong> vue <strong>de</strong> la caméra<br />
P : point terrain observé sur l'ouvrage<br />
On note également R X , R Y et R Z les angles définissant la rotation dans l'espace qui permet <strong>de</strong> passer <strong>de</strong><br />
l'orientation du repère image à celle du repère terrain.<br />
Géolocalisation par photogrammétrie <strong>de</strong>s désordres d'ouvrages d'art 14