Rapport de stage - Pages perso - LCPC
Rapport de stage - Pages perso - LCPC
Rapport de stage - Pages perso - LCPC

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Projet <strong>de</strong> Fin d'Etu<strong>de</strong>s <strong>de</strong> Noémie VANETTI Septembre 2008<br />
Les paramètres <strong>de</strong> l'orientation externe sont donc au nombre <strong>de</strong> 6 (ω,φ,κ,X 0 ,Y 0 ,Z 0 ) pour chacune <strong>de</strong>s 8<br />
images, soit 48 paramètres. A ces inconnues s'ajoutent les coordonnées (X,Y,Z) <strong>de</strong>s 208 points <strong>de</strong><br />
liaison, ce qui donne au total 672 inconnues.<br />
Considérant les points d'appui comme <strong>de</strong>s observations pour le calcul <strong>de</strong> compensation, on ajoute<br />
donc 3 (X,Y,Z) x 9 points d'appui, soit 27 paramètres, aux 672 précé<strong>de</strong>nts. On obtient finalement un<br />
nombre d'inconnues <strong>de</strong> 699. Avec un nombre d'observations <strong>de</strong> 929 prenant en compte toutes les<br />
mesures <strong>de</strong>s points (points <strong>de</strong> liaison et points d'appui) sur chacune <strong>de</strong>s images, on obtient un <strong>de</strong>gré <strong>de</strong><br />
liberté <strong>de</strong> 929 – 699 = 230 ce qui offre une redondance suffisante pour le calcul <strong>de</strong> compensation.<br />
3. Compensation<br />
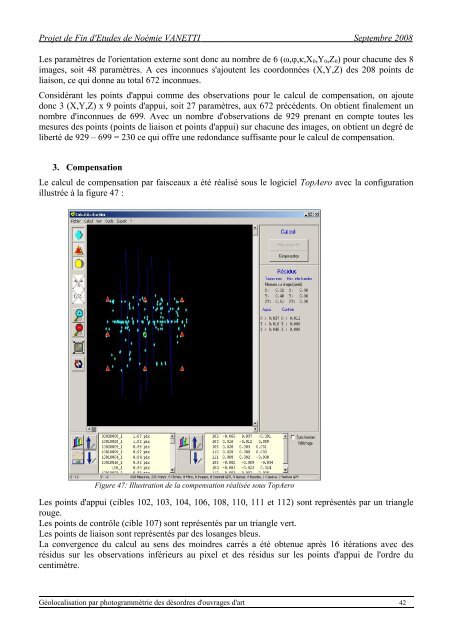
Le calcul <strong>de</strong> compensation par faisceaux a été réalisé sous le logiciel TopAero avec la configuration<br />
illustrée à la figure 47 :<br />
Figure 47: Illustration <strong>de</strong> la compensation réalisée sous TopAero<br />
Les points d'appui (cibles 102, 103, 104, 106, 108, 110, 111 et 112) sont représentés par un triangle<br />
rouge.<br />
Les points <strong>de</strong> contrôle (cible 107) sont représentés par un triangle vert.<br />
Les points <strong>de</strong> liaison sont représentés par <strong>de</strong>s losanges bleus.<br />
La convergence du calcul au sens <strong>de</strong>s moindres carrés a été obtenue après 16 itérations avec <strong>de</strong>s<br />
résidus sur les observations inférieurs au pixel et <strong>de</strong>s résidus sur les points d'appui <strong>de</strong> l'ordre du<br />
centimètre.<br />
Géolocalisation par photogrammétrie <strong>de</strong>s désordres d'ouvrages d'art 42