

VKR C2 2005 版 - KUKA Robotics
VKR C2 2005 版 - KUKA Robotics
VKR C2 2005 版 - KUKA Robotics

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
规 划<br />
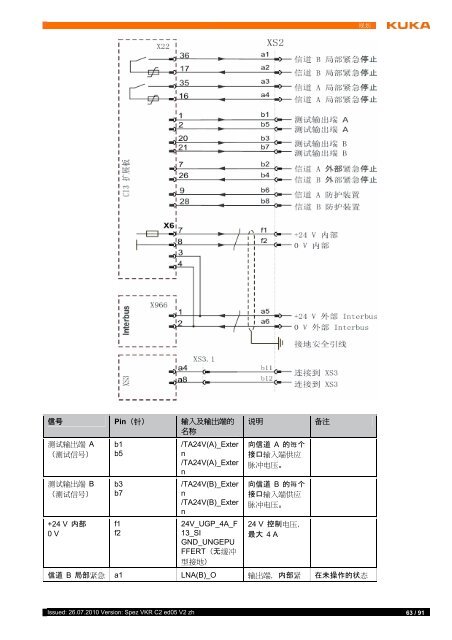
信 号 Pin( 针 ) 输 入 及 输 出 端 的<br />
名 称<br />
说 明<br />
测 试 输 出 端 A b1 /TA24V(A)_Exter 向 信 道 A 的 每 个<br />
( 测 试 信 号 ) b5<br />
n<br />
/TA24V(A)_Exter<br />
n<br />
接 口 输 入 端 供 应<br />
脉 冲 电 压 。<br />
测 试 输 出 端 B b3 /TA24V(B)_Exter 向 信 道 B 的 每 个<br />
( 测 试 信 号 ) b7<br />
n<br />
/TA24V(B)_Exter<br />
n<br />
接 口 输 入 端 供 应<br />
脉 冲 电 压 。<br />
+24 V 内 部 f1<br />
24V_UGP_4A_F 24 V 控 制 电 压 ,<br />
0 V<br />
f2<br />
13_SI<br />
GND_UNGEPU<br />
FFERT( 无 缓 冲<br />
型 接 地 )<br />
最 大 4 A<br />
信 道 B 局 部 紧 急 a1<br />
LNA(B)_O 输 出 端 , 内 部 紧 在 未 操 作 的 状 态<br />
备 注<br />
Issued: 26.07.2010 Version: Spez <strong>VKR</strong> <strong>C2</strong> ed05 V2 zh 63 / 91














