

VKR C2 2005 版 - KUKA Robotics
VKR C2 2005 版 - KUKA Robotics
VKR C2 2005 版 - KUKA Robotics

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
规 划<br />
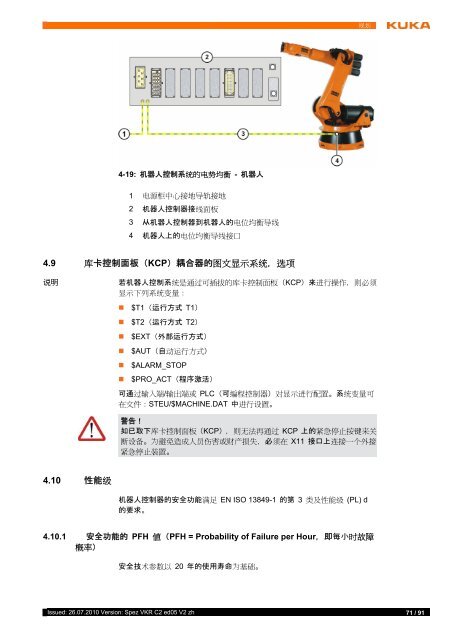
4-19: 机 器 人 控 制 系 统 的 电 势 均 衡 - 机 器 人<br />
1 电 源 柜 中 心 接 地 导 轨 接 地<br />
2 机 器 人 控 制 器 接 线 面 板<br />
3 从 机 器 人 控 制 器 到 机 器 人 的 电 位 均 衡 导 线<br />
4 机 器 人 上 的 电 位 均 衡 导 线 接 口<br />
4.9 库 卡 控 制 面 板 (KCP) 耦 合 器 的 图 文 显 示 系 统 , 选 项<br />
说 明<br />
若 机 器 人 控 制 系 统 是 通 过 可 插 拔 的 库 卡 控 制 面 板 (KCP) 来 进 行 操 作 , 则 必 须<br />
显 示 下 列 系 统 变 量 :<br />
• $T1( 运 行 方 式 T1)<br />
• $T2( 运 行 方 式 T2)<br />
• $EXT( 外 部 运 行 方 式 )<br />
• $AUT( 自 动 运 行 方 式 )<br />
• $ALARM_STOP<br />
• $PRO_ACT( 程 序 激 活 )<br />
可 通 过 输 入 端 / 输 出 端 或 PLC( 可 编 程 控 制 器 ) 对 显 示 进 行 配 置 。 系 统 变 量 可<br />
在 文 件 :STEU/$MACHINE.DAT 中 进 行 设 置 。<br />
警 告 !<br />
如 已 取 下 库 卡 控 制 面 板 (KCP), 则 无 法 再 通 过 KCP 上 的 紧 急 停 止 按 键 来 关<br />
断 设 备 。 为 避 免 造 成 人 员 伤 害 或 财 产 损 失 , 必 须 在 X11 接 口 上 连 接 一 个 外 接<br />
紧 急 停 止 装 置 。<br />
4.10 性 能 级<br />
机 器 人 控 制 器 的 安 全 功 能 满 足 EN ISO 13849-1 的 第 3 类 及 性 能 级 (PL) d<br />
的 要 求 。<br />
4.10.1 安 全 功 能 的 PFH 值 (PFH = Probability of Failure per Hour, 即 每 小 时 故 障<br />
概 率 )<br />
安 全 技 术 参 数 以 20 年 的 使 用 寿 命 为 基 础 。<br />
Issued: 26.07.2010 Version: Spez <strong>VKR</strong> <strong>C2</strong> ed05 V2 zh 71 / 91














