

KR C4; KR C4 CK - KUKA Robotics
KR C4; KR C4 CK - KUKA Robotics
KR C4; KR C4 CK - KUKA Robotics

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
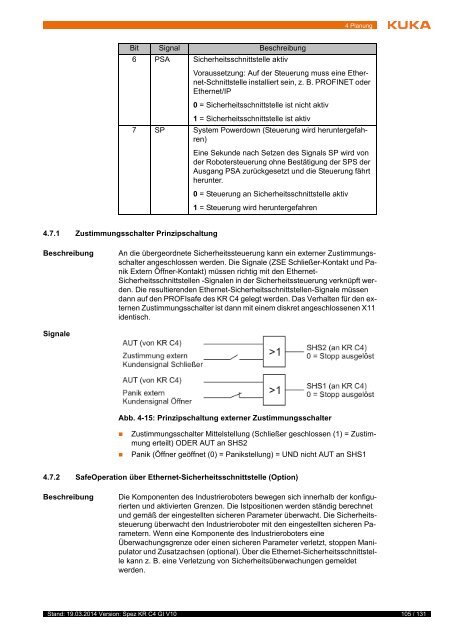
4 PlanungBit Signal Beschreibung6 PSA Sicherheitsschnittstelle aktivVoraussetzung: Auf der Steuerung muss eine Ethernet-Schnittstelleinstalliert sein, z. B. PROFINET oderEthernet/IP0 = Sicherheitsschnittstelle ist nicht aktiv1 = Sicherheitsschnittstelle ist aktiv7 SP System Powerdown (Steuerung wird heruntergefahren)Eine Sekunde nach Setzen des Signals SP wird vonder Robotersteuerung ohne Bestätigung der SPS derAusgang PSA zurückgesetzt und die Steuerung fährtherunter.0 = Steuerung an Sicherheitsschnittstelle aktiv1 = Steuerung wird heruntergefahren4.7.1 Zustimmungsschalter PrinzipschaltungBeschreibungAn die übergeordnete Sicherheitssteuerung kann ein externer Zustimmungsschalterangeschlossen werden. Die Signale (ZSE Schließer-Kontakt und PanikExtern Öffner-Kontakt) müssen richtig mit den Ethernet-Sicherheitsschnittstellen -Signalen in der Sicherheitssteuerung verknüpft werden.Die resultierenden Ethernet-Sicherheitsschnittstellen-Signale müssendann auf den PROFIsafe des <strong>KR</strong> <strong>C4</strong> gelegt werden. Das Verhalten für den externenZustimmungsschalter ist dann mit einem diskret angeschlossenen X11identisch.SignaleAbb. 4-15: Prinzipschaltung externer Zustimmungsschalter• Zustimmungsschalter Mittelstellung (Schließer geschlossen (1) = Zustimmungerteilt) ODER AUT an SHS2• Panik (Öffner geöffnet (0) = Panikstellung) = UND nicht AUT an SHS14.7.2 SafeOperation über Ethernet-Sicherheitsschnittstelle (Option)BeschreibungDie Komponenten des Industrieroboters bewegen sich innerhalb der konfiguriertenund aktivierten Grenzen. Die Istpositionen werden ständig berechnetund gemäß der eingestellten sicheren Parameter überwacht. Die Sicherheitssteuerungüberwacht den Industrieroboter mit den eingestellten sicheren Parametern.Wenn eine Komponente des Industrieroboters eineÜberwachungsgrenze oder einen sicheren Parameter verletzt, stoppen Manipulatorund Zusatzachsen (optional). Über die Ethernet-Sicherheitsschnittstellekann z. B. eine Verletzung von Sicherheitsüberwachungen gemeldetwerden.Stand: 19.03.2014 Version: Spez <strong>KR</strong> <strong>C4</strong> GI V10105 / 131














