

KR C4; KR C4 CK - KUKA Robotics
KR C4; KR C4 CK - KUKA Robotics
KR C4; KR C4 CK - KUKA Robotics

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
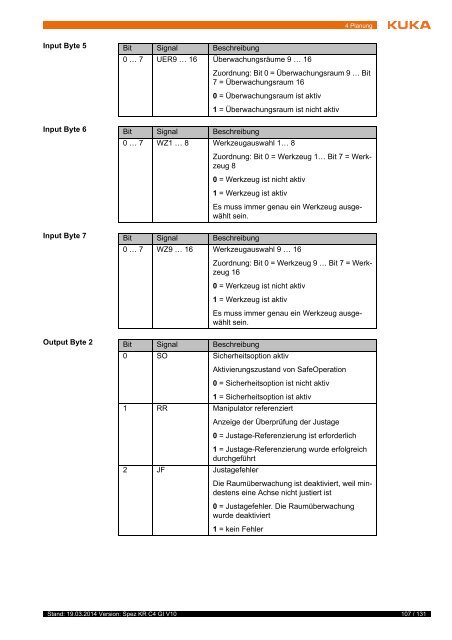
4 PlanungInput Byte 5Input Byte 6Input Byte 7Output Byte 2Bit Signal Beschreibung0 … 7 UER9 … 16 Überwachungsräume 9 … 16Zuordnung: Bit 0 = Überwachungsraum 9 … Bit7 = Überwachungsraum 160 = Überwachungsraum ist aktiv1 = Überwachungsraum ist nicht aktivBit Signal Beschreibung0 … 7 WZ1 … 8 Werkzeugauswahl 1… 8Zuordnung: Bit 0 = Werkzeug 1… Bit 7 = Werkzeug80 = Werkzeug ist nicht aktiv1 = Werkzeug ist aktivEs muss immer genau ein Werkzeug ausgewähltsein.Bit Signal Beschreibung0 … 7 WZ9 … 16 Werkzeugauswahl 9 … 16Zuordnung: Bit 0 = Werkzeug 9 … Bit 7 = Werkzeug160 = Werkzeug ist nicht aktiv1 = Werkzeug ist aktivEs muss immer genau ein Werkzeug ausgewähltsein.Bit Signal Beschreibung0 SO Sicherheitsoption aktivAktivierungszustand von SafeOperation0 = Sicherheitsoption ist nicht aktiv1 = Sicherheitsoption ist aktiv1 RR Manipulator referenziertAnzeige der Überprüfung der Justage0 = Justage-Referenzierung ist erforderlich1 = Justage-Referenzierung wurde erfolgreichdurchgeführt2 JF JustagefehlerDie Raumüberwachung ist deaktiviert, weil mindestenseine Achse nicht justiert ist0 = Justagefehler. Die Raumüberwachungwurde deaktiviert1 = kein FehlerStand: 19.03.2014 Version: Spez <strong>KR</strong> <strong>C4</strong> GI V10107 / 131














