

KR C4; KR C4 CK - KUKA Robotics
KR C4; KR C4 CK - KUKA Robotics
KR C4; KR C4 CK - KUKA Robotics

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
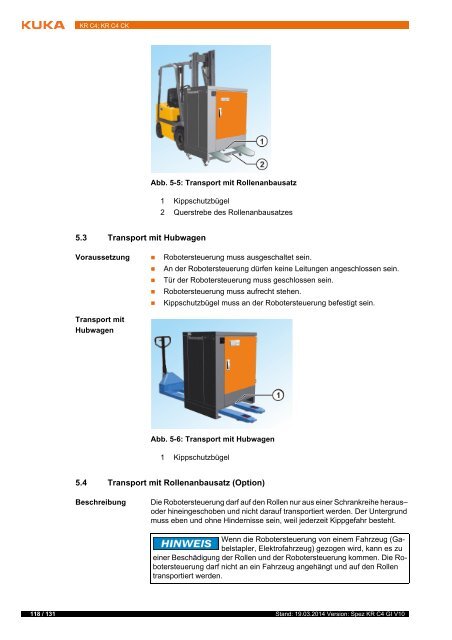
<strong>KR</strong> <strong>C4</strong>; <strong>KR</strong> <strong>C4</strong> <strong>CK</strong>Abb. 5-5: Transport mit Rollenanbausatz1 Kippschutzbügel2 Querstrebe des Rollenanbausatzes5.3 Transport mit HubwagenVoraussetzung • Robotersteuerung muss ausgeschaltet sein.Transport mitHubwagen• An der Robotersteuerung dürfen keine Leitungen angeschlossen sein.• Tür der Robotersteuerung muss geschlossen sein.• Robotersteuerung muss aufrecht stehen.• Kippschutzbügel muss an der Robotersteuerung befestigt sein.Abb. 5-6: Transport mit Hubwagen1 Kippschutzbügel5.4 Transport mit Rollenanbausatz (Option)BeschreibungDie Robotersteuerung darf auf den Rollen nur aus einer Schrankreihe heraus–oder hineingeschoben und nicht darauf transportiert werden. Der Untergrundmuss eben und ohne Hindernisse sein, weil jederzeit Kippgefahr besteht.Wenn die Robotersteuerung von einem Fahrzeug (Gabelstapler,Elektrofahrzeug) gezogen wird, kann es zueiner Beschädigung der Rollen und der Robotersteuerung kommen. Die Robotersteuerungdarf nicht an ein Fahrzeug angehängt und auf den Rollentransportiert werden.118 / 131 Stand: 19.03.2014 Version: Spez <strong>KR</strong> <strong>C4</strong> GI V10














