

KR C4; KR C4 CK - KUKA Robotics
KR C4; KR C4 CK - KUKA Robotics
KR C4; KR C4 CK - KUKA Robotics

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
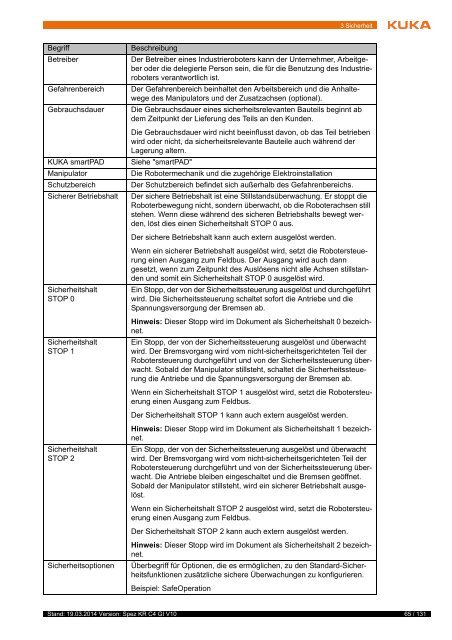
3 SicherheitBegriffBetreiberGefahrenbereichGebrauchsdauer<strong>KUKA</strong> smartPADManipulatorSchutzbereichSicherer BetriebshaltSicherheitshaltSTOP 0SicherheitshaltSTOP 1SicherheitshaltSTOP 2SicherheitsoptionenBeschreibungDer Betreiber eines Industrieroboters kann der Unternehmer, Arbeitgeberoder die delegierte Person sein, die für die Benutzung des Industrierobotersverantwortlich ist.Der Gefahrenbereich beinhaltet den Arbeitsbereich und die Anhaltewegedes Manipulators und der Zusatzachsen (optional).Die Gebrauchsdauer eines sicherheitsrelevanten Bauteils beginnt abdem Zeitpunkt der Lieferung des Teils an den Kunden.Die Gebrauchsdauer wird nicht beeinflusst davon, ob das Teil betriebenwird oder nicht, da sicherheitsrelevante Bauteile auch während derLagerung altern.Siehe "smartPAD"Die Robotermechanik und die zugehörige ElektroinstallationDer Schutzbereich befindet sich außerhalb des Gefahrenbereichs.Der sichere Betriebshalt ist eine Stillstandsüberwachung. Er stoppt dieRoboterbewegung nicht, sondern überwacht, ob die Roboterachsen stillstehen. Wenn diese während des sicheren Betriebshalts bewegt werden,löst dies einen Sicherheitshalt STOP 0 aus.Der sichere Betriebshalt kann auch extern ausgelöst werden.Wenn ein sicherer Betriebshalt ausgelöst wird, setzt die Robotersteuerungeinen Ausgang zum Feldbus. Der Ausgang wird auch danngesetzt, wenn zum Zeitpunkt des Auslösens nicht alle Achsen stillstandenund somit ein Sicherheitshalt STOP 0 ausgelöst wird.Ein Stopp, der von der Sicherheitssteuerung ausgelöst und durchgeführtwird. Die Sicherheitssteuerung schaltet sofort die Antriebe und dieSpannungsversorgung der Bremsen ab.Hinweis: Dieser Stopp wird im Dokument als Sicherheitshalt 0 bezeichnet.Ein Stopp, der von der Sicherheitssteuerung ausgelöst und überwachtwird. Der Bremsvorgang wird vom nicht-sicherheitsgerichteten Teil derRobotersteuerung durchgeführt und von der Sicherheitssteuerung überwacht.Sobald der Manipulator stillsteht, schaltet die Sicherheitssteuerungdie Antriebe und die Spannungsversorgung der Bremsen ab.Wenn ein Sicherheitshalt STOP 1 ausgelöst wird, setzt die Robotersteuerungeinen Ausgang zum Feldbus.Der Sicherheitshalt STOP 1 kann auch extern ausgelöst werden.Hinweis: Dieser Stopp wird im Dokument als Sicherheitshalt 1 bezeichnet.Ein Stopp, der von der Sicherheitssteuerung ausgelöst und überwachtwird. Der Bremsvorgang wird vom nicht-sicherheitsgerichteten Teil derRobotersteuerung durchgeführt und von der Sicherheitssteuerung überwacht.Die Antriebe bleiben eingeschaltet und die Bremsen geöffnet.Sobald der Manipulator stillsteht, wird ein sicherer Betriebshalt ausgelöst.Wenn ein Sicherheitshalt STOP 2 ausgelöst wird, setzt die Robotersteuerungeinen Ausgang zum Feldbus.Der Sicherheitshalt STOP 2 kann auch extern ausgelöst werden.Hinweis: Dieser Stopp wird im Dokument als Sicherheitshalt 2 bezeichnet.Überbegriff für Optionen, die es ermöglichen, zu den Standard-Sicherheitsfunktionenzusätzliche sichere Überwachungen zu konfigurieren.Beispiel: SafeOperationStand: 19.03.2014 Version: Spez <strong>KR</strong> <strong>C4</strong> GI V1065 / 131














