

KR C4; KR C4 CK - KUKA Robotics
KR C4; KR C4 CK - KUKA Robotics
KR C4; KR C4 CK - KUKA Robotics

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
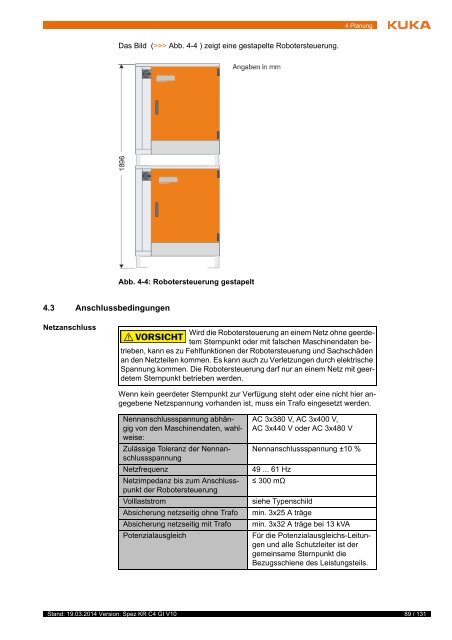
4 PlanungDas Bild (>>> Abb. 4-4 ) zeigt eine gestapelte Robotersteuerung.Abb. 4-4: Robotersteuerung gestapelt4.3 AnschlussbedingungenNetzanschlussWird die Robotersteuerung an einem Netz ohne geerdetemSternpunkt oder mit falschen Maschinendaten betrieben,kann es zu Fehlfunktionen der Robotersteuerung und Sachschädenan den Netzteilen kommen. Es kann auch zu Verletzungen durch elektrischeSpannung kommen. Die Robotersteuerung darf nur an einem Netz mit geerdetemSternpunkt betrieben werden.Wenn kein geerdeter Sternpunkt zur Verfügung steht oder eine nicht hier angegebeneNetzspannung vorhanden ist, muss ein Trafo eingesetzt werden.Nennanschlussspannung abhängigvon den Maschinendaten, wahlweise:Zulässige Toleranz der NennanschlussspannungNetzfrequenzNetzimpedanz bis zum Anschlusspunktder RobotersteuerungVolllaststromAbsicherung netzseitig ohne TrafoAbsicherung netzseitig mit TrafoPotenzialausgleichAC 3x380 V, AC 3x400 V,AC 3x440 V oder AC 3x480 VNennanschlussspannung ±10 %49 ... 61 Hz≤ 300 mΩsiehe Typenschildmin. 3x25 A trägemin. 3x32 A träge bei 13 kVAFür die Potenzialausgleichs-Leitungenund alle Schutzleiter ist dergemeinsame Sternpunkt dieBezugsschiene des Leistungsteils.Stand: 19.03.2014 Version: Spez <strong>KR</strong> <strong>C4</strong> GI V1089 / 131














