

Structural Health Monitoring Using Smart Sensors - ideals ...
Structural Health Monitoring Using Smart Sensors - ideals ...
Structural Health Monitoring Using Smart Sensors - ideals ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Time (sec)<br />
80<br />
60<br />
40<br />
20<br />
0<br />
-20<br />
-40<br />
-60<br />
-80<br />
-100<br />
50 100 150 200 250 300<br />
Repetition<br />
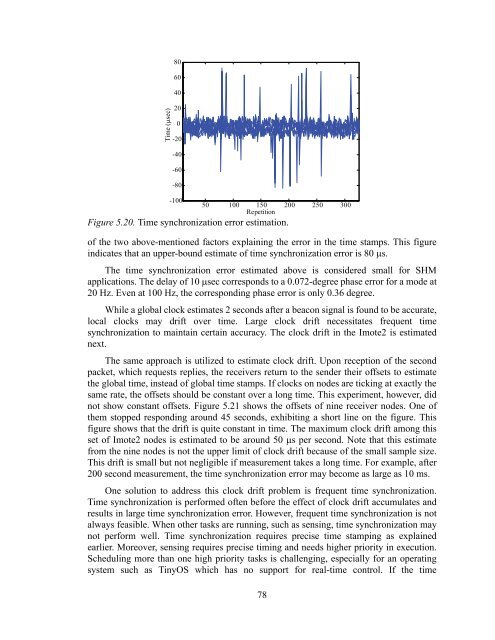
Figure 5.20. Time synchronization error estimation.<br />
of the two above-mentioned factors explaining the error in the time stamps. This figure<br />
indicates that an upper-bound estimate of time synchronization error is 80 s.<br />
The time synchronization error estimated above is considered small for SHM<br />
applications. The delay of 10 sec corresponds to a 0.072-degree phase error for a mode at<br />
20 Hz. Even at 100 Hz, the corresponding phase error is only 0.36 degree.<br />
While a global clock estimates 2 seconds after a beacon signal is found to be accurate,<br />
local clocks may drift over time. Large clock drift necessitates frequent time<br />
synchronization to maintain certain accuracy. The clock drift in the Imote2 is estimated<br />
next.<br />
The same approach is utilized to estimate clock drift. Upon reception of the second<br />
packet, which requests replies, the receivers return to the sender their offsets to estimate<br />
the global time, instead of global time stamps. If clocks on nodes are ticking at exactly the<br />
same rate, the offsets should be constant over a long time. This experiment, however, did<br />
not show constant offsets. Figure 5.21 shows the offsets of nine receiver nodes. One of<br />
them stopped responding around 45 seconds, exhibiting a short line on the figure. This<br />
figure shows that the drift is quite constant in time. The maximum clock drift among this<br />
set of Imote2 nodes is estimated to be around 50 s per second. Note that this estimate<br />
from the nine nodes is not the upper limit of clock drift because of the small sample size.<br />
This drift is small but not negligible if measurement takes a long time. For example, after<br />
200 second measurement, the time synchronization error may become as large as 10 ms.<br />
One solution to address this clock drift problem is frequent time synchronization.<br />
Time synchronization is performed often before the effect of clock drift accumulates and<br />
results in large time synchronization error. However, frequent time synchronization is not<br />
always feasible. When other tasks are running, such as sensing, time synchronization may<br />
not perform well. Time synchronization requires precise time stamping as explained<br />
earlier. Moreover, sensing requires precise timing and needs higher priority in execution.<br />
Scheduling more than one high priority tasks is challenging, especially for an operating<br />
system such as TinyOS which has no support for real-time control. If the time<br />
78













