

Structural Health Monitoring Using Smart Sensors - ideals ...
Structural Health Monitoring Using Smart Sensors - ideals ...
Structural Health Monitoring Using Smart Sensors - ideals ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Samples<br />
3<br />
2<br />
1<br />
0<br />
-1<br />
-2<br />
Samples<br />
3<br />
2<br />
1<br />
0<br />
-1<br />
-2<br />
-3<br />
27.9 27.95<br />
Time (sec)<br />
28<br />
(a)<br />
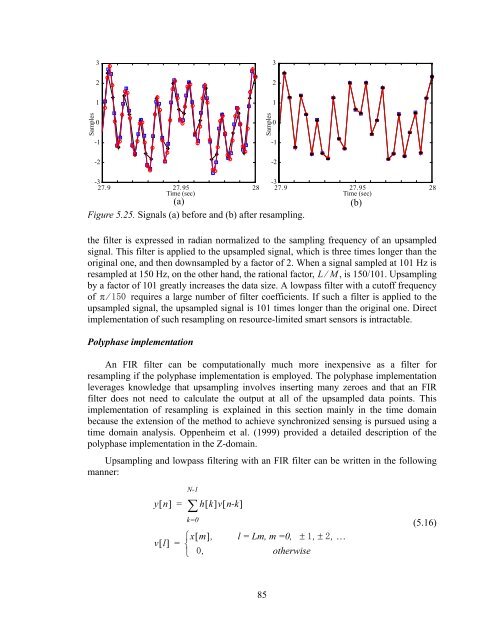
Figure 5.25. Signals (a) before and (b) after resampling.<br />
-3<br />
27.9 27.95<br />
Time (sec)<br />
28<br />
(b)<br />
the filter is expressed in radian normalized to the sampling frequency of an upsampled<br />
signal. This filter is applied to the upsampled signal, which is three times longer than the<br />
original one, and then downsampled by a factor of 2. When a signal sampled at 101 Hz is<br />
resampled at 150 Hz, on the other hand, the rational factor, L<br />
M, is 150/101. Upsampling<br />
by a factor of 101 greatly increases the data size. A lowpass filter with a cutoff frequency<br />
of requires a large number of filter coefficients. If such a filter is applied to the<br />
upsampled signal, the upsampled signal is 101 times longer than the original one. Direct<br />
implementation of such resampling on resource-limited smart sensors is intractable.<br />
Polyphase implementation<br />
An FIR filter can be computationally much more inexpensive as a filter for<br />
resampling if the polyphase implementation is employed. The polyphase implementation<br />
leverages knowledge that upsampling involves inserting many zeroes and that an FIR<br />
filter does not need to calculate the output at all of the upsampled data points. This<br />
implementation of resampling is explained in this section mainly in the time domain<br />
because the extension of the method to achieve synchronized sensing is pursued using a<br />
time domain analysis. Oppenheim et al. (1999) provided a detailed description of the<br />
polyphase implementation in the Z-domain.<br />
Upsampling and lowpass filtering with an FIR filter can be written in the following<br />
manner:<br />
yn <br />
vl <br />
=<br />
N-1<br />
<br />
k=0<br />
xm<br />
,<br />
= <br />
,<br />
hk vn-k <br />
l = Lm, m =0, , , <br />
otherwise<br />
(5.16)<br />
85













