

Structural Health Monitoring Using Smart Sensors - ideals ...
Structural Health Monitoring Using Smart Sensors - ideals ...
Structural Health Monitoring Using Smart Sensors - ideals ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Timer firing every T3<br />
110 data points from sensing driver<br />
T3 T3 T3 T3<br />
t 1<br />
t 2<br />
t 3<br />
t 4<br />
t 5<br />
t 6<br />
t 7<br />
t 8<br />
t<br />
…<br />
n<br />
110 110 110 110 110 110 110 110 110<br />
Start a<br />
sensing task<br />
Start storing<br />
data<br />
Data copied to an array<br />
Check for<br />
sensing<br />
failure<br />
t1 t1+T1 t1+T2 t1+T4<br />
Time<br />
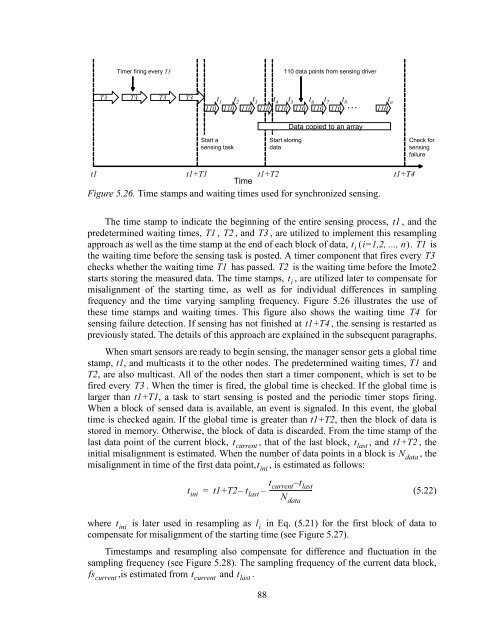
Figure 5.26. Time stamps and waiting times used for synchronized sensing.<br />
The time stamp to indicate the beginning of the entire sensing process, t1 , and the<br />
predetermined waiting times, T1 , T2 , and T3 , are utilized to implement this resampling<br />
approach as well as the time stamp at the end of each block of data, t i<br />
i=1,2, ..., n. T1 is<br />
the waiting time before the sensing task is posted. A timer component that fires every T3<br />
checks whether the waiting time T1 has passed. T2 is the waiting time before the Imote2<br />
starts storing the measured data. The time stamps, t i<br />
, are utilized later to compensate for<br />
misalignment of the starting time, as well as for individual differences in sampling<br />
frequency and the time varying sampling frequency. Figure 5.26 illustrates the use of<br />
these time stamps and waiting times. This figure also shows the waiting time T4 for<br />
sensing failure detection. If sensing has not finished at t1+T4 , the sensing is restarted as<br />
previously stated. The details of this approach are explained in the subsequent paragraphs.<br />
When smart sensors are ready to begin sensing, the manager sensor gets a global time<br />
stamp, t1, and multicasts it to the other nodes. The predetermined waiting times, T1 and<br />
T2, are also multicast. All of the nodes then start a timer component, which is set to be<br />
fired every T3 . When the timer is fired, the global time is checked. If the global time is<br />
larger than t1+T1, a task to start sensing is posted and the periodic timer stops firing.<br />
When a block of sensed data is available, an event is signaled. In this event, the global<br />
time is checked again. If the global time is greater than t1+T2, then the block of data is<br />
stored in memory. Otherwise, the block of data is discarded. From the time stamp of the<br />
last data point of the current block, t current<br />
, that of the last block, t last<br />
, and t1+T2 , the<br />
initial misalignment is estimated. When the number of data points in a block is N data<br />
, the<br />
misalignment in time of the first data point, , is estimated as follows:<br />
t ini<br />
= t1+T2–<br />
t last<br />
t ini<br />
t current<br />
– t last<br />
– --------------------------<br />
N data<br />
88<br />
(5.22)<br />
where t ini<br />
is later used in resampling as l i<br />
in Eq. (5.21) for the first block of data to<br />
compensate for misalignment of the starting time (see Figure 5.27).<br />
Timestamps and resampling also compensate for difference and fluctuation in the<br />
sampling frequency (see Figure 5.28). The sampling frequency of the current data block,<br />
fs current<br />
,is estimated from t current<br />
and t last<br />
.













