CSEM Scientific and Technical Report 2008
CSEM Scientific and Technical Report 2008
CSEM Scientific and Technical Report 2008

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
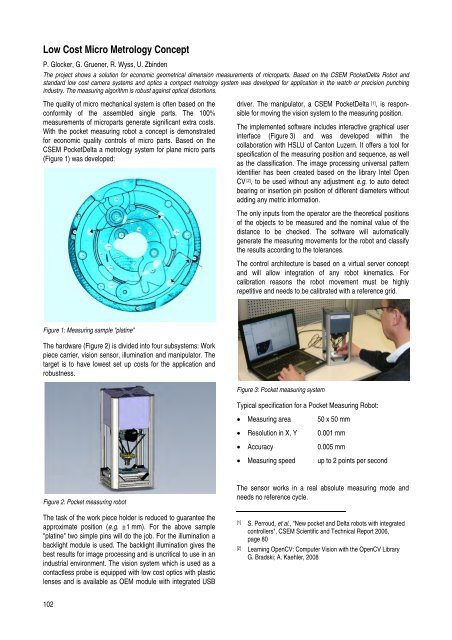
Low Cost Micro Metrology Concept<br />
P. Glocker, G. Gruener, R. Wyss, U. Zbinden<br />
The project shows a solution for economic geometrical dimension measurements of microparts. Based on the <strong>CSEM</strong> PocketDelta Robot <strong>and</strong><br />
st<strong>and</strong>ard low cost camera systems <strong>and</strong> optics a compact metrology system was developed for application in the watch or precision punching<br />
industry. The measuring algorithm is robust against optical distortions.<br />
The quality of micro mechanical system is often based on the<br />
conformity of the assembled single parts. The 100%<br />
measurements of microparts generate significant extra costs.<br />
With the pocket measuring robot a concept is demonstrated<br />
for economic quality controls of micro parts. Based on the<br />
<strong>CSEM</strong> PocketDelta a metrology system for plane micro parts<br />
(Figure 1) was developed:<br />
Figure 1: Measuring sample "platine"<br />
The hardware (Figure 2) is divided into four subsystems: Work<br />
piece carrier, vision sensor, illumination <strong>and</strong> manipulator. The<br />
target is to have lowest set up costs for the application <strong>and</strong><br />
robustness.<br />
Figure 2: Pocket measuring robot<br />
The task of the work piece holder is reduced to guarantee the<br />
approximate position (e.g. ±1 mm). For the above sample<br />
"platine" two simple pins will do the job. For the illumination a<br />
backlight module is used. The backlight illumination gives the<br />
best results for image processing <strong>and</strong> is uncritical to use in an<br />
industrial environment. The vision system which is used as a<br />
contactless probe is equipped with low cost optics with plastic<br />
lenses <strong>and</strong> is available as OEM module with integrated USB<br />
102<br />
driver. The manipulator, a <strong>CSEM</strong> PocketDelta [1] , is responsible<br />
for moving the vision system to the measuring position.<br />
The implemented software includes interactive graphical user<br />
interface (Figure 3) <strong>and</strong> was developed within the<br />
collaboration with HSLU of Canton Luzern. It offers a tool for<br />
specification of the measuring position <strong>and</strong> sequence, as well<br />
as the classification. The image processing universal pattern<br />
identifier has been created based on the library Intel Open<br />
CV [2] , to be used without any adjustment e.g. to auto detect<br />
bearing or insertion pin position of different diameters without<br />
adding any metric information.<br />
The only inputs from the operator are the theoretical positions<br />
of the objects to be measured <strong>and</strong> the nominal value of the<br />
distance to be checked. The software will automatically<br />
generate the measuring movements for the robot <strong>and</strong> classify<br />
the results according to the tolerances.<br />
The control architecture is based on a virtual server concept<br />
<strong>and</strong> will allow integration of any robot kinematics. For<br />
calibration reasons the robot movement must be highly<br />
repetitive <strong>and</strong> needs to be calibrated with a reference grid.<br />
Figure 3: Pocket measuring system<br />
Typical specification for a Pocket Measuring Robot:<br />
• Measuring area 50 x 50 mm<br />
• Resolution in X, Y 0.001 mm<br />
• Accuracy 0.005 mm<br />
• Measuring speed up to 2 points per second<br />
The sensor works in a real absolute measuring mode <strong>and</strong><br />
needs no reference cycle.<br />
[1] S. Perroud, et al., "New pocket <strong>and</strong> Delta robots with integrated<br />
controllers", <strong>CSEM</strong> <strong>Scientific</strong> <strong>and</strong> <strong>Technical</strong> <strong>Report</strong> 2006,<br />
page 80<br />
[2] Learning OpenCV: Computer Vision with the OpenCV Library<br />
G. Bradski; A. Kaehler, <strong>2008</strong>