CSEM Scientific and Technical Report 2008
CSEM Scientific and Technical Report 2008
CSEM Scientific and Technical Report 2008

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Compressed Sensing: Multi-user Impulse Radio Ultra-wideb<strong>and</strong> Time of Arrival<br />
Estimation<br />
H. Zhan, J. Ayadi , J. Y. Le Boudec • , J. Farserotu<br />
This study considers the application of Compressed Sensing (CS) for Time of Arrival (ToA) estimation with Impulse Radio (IR) Ultra-WideB<strong>and</strong><br />
(UWB) radio [1] is considered. The fine time resolution of IR UWB signals has created a vision of novel ranging <strong>and</strong> positioning applications to<br />
augment existing narrowb<strong>and</strong> systems operating in dense multipath environments. ToA estimation is used in range-based localization to help<br />
determine the distance between the transmitter <strong>and</strong> receiver from the propagation time of the signal.<br />
For many years, signal acquisition systems have been based<br />
on the Nyquist-Shannon sampling theorem that states that the<br />
number of samples needed to recover a signal without error is<br />
twice the b<strong>and</strong>width. Recently, the emerging field of CS has<br />
let to a fresh look at data acquisition: the number of required<br />
measurements needed to reconstruct signal without error<br />
depends on its sparsity <strong>and</strong> not on its b<strong>and</strong>width. Hence, if the<br />
signal has a very sparse representation on some basis, or<br />
more generally on some dictionary, it is possible to sample it<br />
using very few, linear measurements.<br />
CS theory always has two steps. (1) First step is measuring<br />
(sampling) process. In this step, a few r<strong>and</strong>om measurements<br />
(samples) are generated by projecting the sparse signal onto<br />
a r<strong>and</strong>om basis. For continuous signals, CS suggests a new<br />
framework for Analog-to-Information (A/I) conversion which<br />
offers a promising approach to the Analog-to-Digital (A/D)<br />
conversion bottleneck that enables sampling at a rate<br />
comparable to the sparse signal information rate rather than<br />
Nyquist rate. Wideb<strong>and</strong> signals in many RF applications often<br />
have a large b<strong>and</strong>width but only low information rate (relative<br />
to sparsity). However, the extremely large b<strong>and</strong>width of the<br />
received IR UWB signal requires very high-speed A/D<br />
converters. The required sampling rate of A/D converters in<br />
UWB receiver may be beyond what is feasible with state- ofthe-art<br />
technology today. CS theory shows promise for<br />
decreasing the required sampling rate, lowering costs <strong>and</strong><br />
reducing complexity. (2) The second step is the recovery<br />
process. The sparse signal can be recovered by the r<strong>and</strong>om<br />
measurements in this step.<br />
However, most CS recovery algorithms work only under<br />
Gaussian noise environments. To recover IR UWB signals<br />
under Non-Gaussian noise (multi-user interference)<br />
environments, a novel CS recovery algorithm that can be used<br />
to estimate ToA with IR UWB radios was developed. First, a<br />
new optimization criterion which is based on CS <strong>and</strong> Akaike<br />
Information Criterion (AIC) was proposed. To solve this<br />
optimization algorithm, a new iterative algorithm which is<br />
based on the Expectation Maximization (EM) algorithm was<br />
developed.<br />
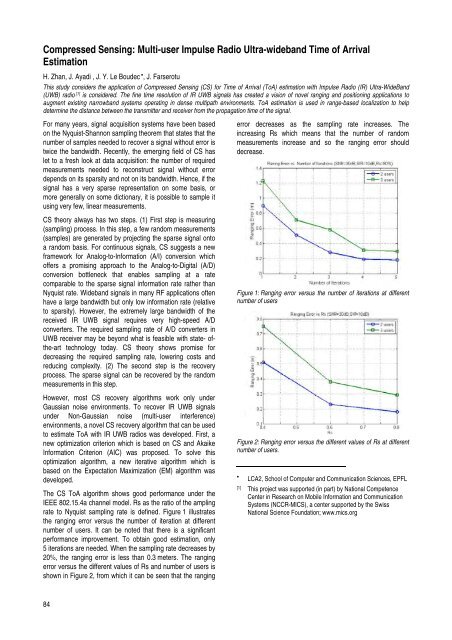
The CS ToA algorithm shows good performance under the<br />
IEEE 802.15.4a channel model. Rs as the ratio of the ampling<br />
rate to Nyquist sampling rate is defined. Figure 1 illustrates<br />
the ranging error versus the number of iteration at different<br />
number of users. It can be noted that there is a significant<br />
performance improvement. To obtain good estimation, only<br />
5 iterations are needed. When the sampling rate decreases by<br />
20%, the ranging error is less than 0.3 meters. The ranging<br />
error versus the different values of Rs <strong>and</strong> number of users is<br />
shown in Figure 2, from which it can be seen that the ranging<br />
84<br />
error decreases as the sampling rate increases. The<br />
increasing Rs which means that the number of r<strong>and</strong>om<br />
measurements increase <strong>and</strong> so the ranging error should<br />
decrease.<br />
Figure 1: Ranging error versus the number of iterations at different<br />
number of users<br />
Figure 2: Ranging error versus the different values of Rs at different<br />
number of users.<br />
•<br />
LCA2, School of Computer <strong>and</strong> Communication Sciences, EPFL<br />
[1] This project was supported (in part) by National Competence<br />
Center in Research on Mobile Information <strong>and</strong> Communication<br />
Systems (NCCR-MICS), a center supported by the Swiss<br />
National Science Foundation; www.mics.org