CSEM Scientific and Technical Report 2008
CSEM Scientific and Technical Report 2008
CSEM Scientific and Technical Report 2008

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Towards Miniaturized Time-of-Flight Cameras<br />
C. Gimkiewicz, S. Schneiter, R. Cook, M. Columbus, D. Beyeler, Y. Li Schrag, H.-R. Graf, Y. Zha, B. Schaffer, S. Neukom, C. Urban,<br />
N. Blanc<br />
Time-of-flight (TOF) cameras extend classical imaging towards the third dimension. They measure the distance for each image pixel <strong>and</strong> therefore<br />
acquire true three dimensional images. Required is an active illumination for which the travel time from the camera to the object <strong>and</strong> back, the timeof-flight,<br />
is measured. New developments like on-chip demodulation drivers in the image sensor, a dedicated digital controller <strong>and</strong> a high efficiency<br />
VCSEL illumination reduce the size <strong>and</strong> the power consumption of the TOF camera down to values comparable to conventional (2D) cameras.<br />
Including distance information into an image is advantageous<br />
for many applications since it allows to simply <strong>and</strong> precisely<br />
locates objects in a scene from a three dimensional image. An<br />
elegant way for such distance measurements is the<br />
measurement of the time-of-flight (TOF), the time that is<br />
required for light to travel from an emitter to an object <strong>and</strong><br />
back to the camera. A TOF camera thus requires an active<br />
illumination <strong>and</strong> a sensor capable of demodulating the<br />
incoming light. In practical implementations the TOF is<br />
measured by the phase shift between the emitted<br />
continuously modulated light intensity <strong>and</strong> the detected signal.<br />
With modulation frequencies of 20 MHz a distance accuracy<br />
of approx. 1 cm can be achieved. Illumination is typically in the<br />
near infrared <strong>and</strong> appears invisible to the human eye.<br />
An important feature of the TOF technology, contrary to<br />
classical 3D imaging methods like, for instance, triangulation,<br />
is the potential for miniaturization without restricting the<br />
performance. In the context of the European project ARTTS a<br />
miniaturized <strong>and</strong> low-power TOF camera has been<br />
developed [1] .<br />
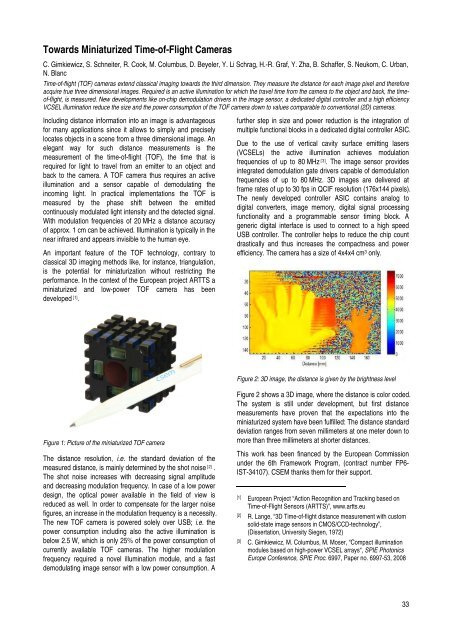
Figure 1: Picture of the miniaturized TOF camera<br />
The distance resolution, i.e. the st<strong>and</strong>ard deviation of the<br />
measured distance, is mainly determined by the shot noise [2] .<br />
The shot noise increases with decreasing signal amplitude<br />
<strong>and</strong> decreasing modulation frequency. In case of a low power<br />
design, the optical power available in the field of view is<br />
reduced as well. In order to compensate for the larger noise<br />
figures, an increase in the modulation frequency is a necessity.<br />
The new TOF camera is powered solely over USB; i.e. the<br />
power consumption including also the active illumination is<br />
below 2.5 W, which is only 25% of the power consumption of<br />
currently available TOF cameras. The higher modulation<br />
frequency required a novel illumination module, <strong>and</strong> a fast<br />
demodulating image sensor with a low power consumption. A<br />
further step in size <strong>and</strong> power reduction is the integration of<br />
multiple functional blocks in a dedicated digital controller ASIC.<br />
Due to the use of vertical cavity surface emitting lasers<br />
(VCSELs) the active illumination achieves modulation<br />
frequencies of up to 80 MHz [ 3] . The image sensor provides<br />
integrated demodulation gate drivers capable of demodulation<br />
frequencies of up to 80 MHz. 3D images are delivered at<br />
frame rates of up to 30 fps in QCIF resolution (176x144 pixels).<br />
The newly developed controller ASIC contains analog to<br />
digital converters, image memory, digital signal processing<br />
functionality <strong>and</strong> a programmable sensor timing block. A<br />
generic digital interface is used to connect to a high speed<br />
USB controller. The controller helps to reduce the chip count<br />
drastically <strong>and</strong> thus increases the compactness <strong>and</strong> power<br />
efficiency. The camera has a size of 4x4x4 cm3 only.<br />
Figure 2: 3D image, the distance is given by the brightness level<br />
Figure 2 shows a 3D image, where the distance is color coded.<br />
The system is still under development, but first distance<br />
measurements have proven that the expectations into the<br />
miniaturized system have been fulfilled: The distance st<strong>and</strong>ard<br />
deviation ranges from seven millimeters at one meter down to<br />
more than three millimeters at shorter distances.<br />
This work has been financed by the European Commission<br />
under the 6th Framework Program, (contract number FP6-<br />
IST-34107). <strong>CSEM</strong> thanks them for their support.<br />
[1] European Project “Action Recognition <strong>and</strong> Tracking based on<br />
Time-of-Flight Sensors (ARTTS)”, www.artts.eu<br />
[2] R. Lange, “3D Time-of-flight distance measurement with custom<br />
solid-state image sensors in CMOS/CCD-technology”,<br />
(Dissertation, University Siegen, 1972)<br />
[3] C. Gimkiewicz, M. Columbus, M. Moser, “Compact illumination<br />
modules based on high-power VCSEL arrays“, SPIE Photonics<br />
Europe Conference, SPIE Proc. 6997, Paper no. 6997-53, <strong>2008</strong><br />
33