CSEM Scientific and Technical Report 2008
CSEM Scientific and Technical Report 2008
CSEM Scientific and Technical Report 2008

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
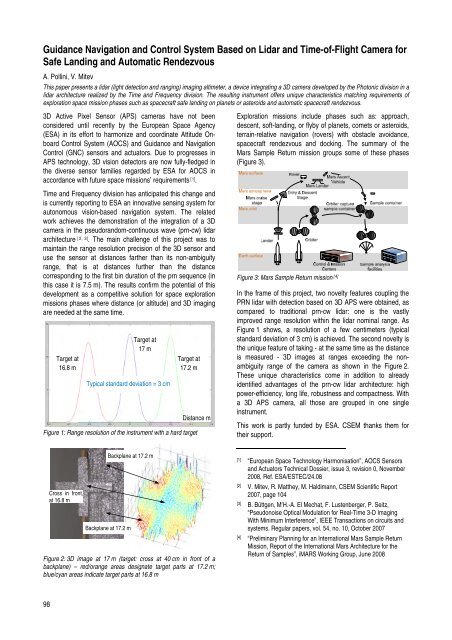
Guidance Navigation <strong>and</strong> Control System Based on Lidar <strong>and</strong> Time-of-Flight Camera for<br />
Safe L<strong>and</strong>ing <strong>and</strong> Automatic Rendezvous<br />
A. Pollini, V. Mitev<br />
This paper presents a lidar (light detection <strong>and</strong> ranging) imaging altimeter, a device integrating a 3D camera developed by the Photonic division in a<br />
lidar architecture realized by the Time <strong>and</strong> Frequency division. The resulting instrument offers unique characteristics matching requirements of<br />
exploration space mission phases such as spacecraft safe l<strong>and</strong>ing on planets or asteroids <strong>and</strong> automatic spacecraft rendezvous.<br />
3D Active Pixel Sensor (APS) cameras have not been<br />
considered until recently by the European Space Agency<br />
(ESA) in its effort to harmonize <strong>and</strong> coordinate Attitude Onboard<br />
Control System (AOCS) <strong>and</strong> Guidance <strong>and</strong> Navigation<br />
Control (GNC) sensors <strong>and</strong> actuators. Due to progresses in<br />
APS technology, 3D vision detectors are now fully-fledged in<br />
the diverse sensor families regarded by ESA for AOCS in<br />
accordance with future space missions’ requirements [1] .<br />
Time <strong>and</strong> Frequency division has anticipated this change <strong>and</strong><br />
is currently reporting to ESA an innovative sensing system for<br />
autonomous vision-based navigation system. The related<br />
work achieves the demonstration of the integration of a 3D<br />
camera in the pseudor<strong>and</strong>om-continuous wave (prn-cw) lidar<br />
architecture [ 2, 3] . The main challenge of this project was to<br />
maintain the range resolution precision of the 3D sensor <strong>and</strong><br />
use the sensor at distances farther than its non-ambiguity<br />
range, that is at distances further than the distance<br />
corresponding to the first bin duration of the prn sequence (in<br />
this case it is 7.5 m). The results confirm the potential of this<br />
development as a competitive solution for space exploration<br />
missions phases where distance (or altitude) <strong>and</strong> 3D imaging<br />
are needed at the same time.<br />
Figure 1: Range resolution of the instrument with a hard target<br />
Figure 2: 3D image at 17 m (target: cross at 40 cm in front of a<br />
backplane) – red/orange areas designate target parts at 17.2 m;<br />
blue/cyan areas indicate target parts at 16.8 m<br />
98<br />
Target at<br />
16.8 m<br />
Cross in front,<br />
at 16.8 m<br />
Target at<br />
17 m<br />
Typical st<strong>and</strong>ard deviation = 3 cm<br />
Backplane at 17.2 m<br />
Backplane at 17.2 m<br />
Target at<br />
17.2 m<br />
Distance m<br />
Exploration missions include phases such as: approach,<br />
descent, soft-l<strong>and</strong>ing, or flyby of planets, comets or asteroids,<br />
terrain-relative navigation (rovers) with obstacle avoidance,<br />
spacecraft rendezvous <strong>and</strong> docking. The summary of the<br />
Mars Sample Return mission groups some of these phases<br />
(Figure 3).<br />
Figure 3: Mars Sample Return mission [4]<br />
In the frame of this project, two novelty features coupling the<br />
PRN lidar with detection based on 3D APS were obtained, as<br />
compared to traditional prn-cw lidar: one is the vastly<br />
improved range resolution within the lidar nominal range. As<br />
Figure 1 shows, a resolution of a few centimeters (typical<br />
st<strong>and</strong>ard deviation of 3 cm) is achieved. The second novelty is<br />
the unique feature of taking - at the same time as the distance<br />
is measured - 3D images at ranges exceeding the nonambiguity<br />
range of the camera as shown in the Figure 2.<br />
These unique characteristics come in addition to already<br />
identified advantages of the prn-cw lidar architecture: high<br />
power-efficiency, long life, robustness <strong>and</strong> compactness. With<br />
a 3D APS camera, all those are grouped in one single<br />
instrument.<br />
This work is partly funded by ESA. <strong>CSEM</strong> thanks them for<br />
their support.<br />
[1] “European Space Technology Harmonisation”, AOCS Sensors<br />
<strong>and</strong> Actuators <strong>Technical</strong> Dossier, issue 3, revision 0, November<br />
<strong>2008</strong>, Ref. ESA/ESTEC/24.08<br />
[2] V. Mitev, R. Matthey, M. Haldimann, <strong>CSEM</strong> <strong>Scientific</strong> <strong>Report</strong><br />
2007, page 104<br />
[3] B. Büttgen, M’H.-A. El Mechat, F. Lustenberger, P. Seitz,<br />
“Pseudonoise Optical Modulation for Real-Time 3-D Imaging<br />
With Minimum Interference”, IEEE Transactions on circuits <strong>and</strong><br />
systems. Regular papers, vol. 54, no. 10, October 2007<br />
[4] “Preliminary Planning for an International Mars Sample Return<br />
Mission, <strong>Report</strong> of the International Mars Architecture for the<br />
Return of Samples”, iMARS Working Group, June <strong>2008</strong>