

Adaptative high-gain extended Kalman filter and applications
Adaptative high-gain extended Kalman filter and applications
Adaptative high-gain extended Kalman filter and applications

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
tel-00559107, version 1 - 24 Jan 2011<br />
1.2 Motivations<br />
− interval observers address models with uncertain parameters. Unlike adaptive observers<br />
they do not estimate the model parameters. They use the fact that any parameter p<br />
lives in an intervals of the form [pmin,pmax] (e.g. [91, 105]).<br />
The present work focuses on <strong>high</strong>-<strong>gain</strong> observers, which are a refinement of <strong>extended</strong><br />
observers, allowing us to prove that the estimation error converges to zero in a global sense.<br />
The design of such observers relies on a general theory of observability for nonlinear systems<br />
[57]. It is proven that the convergence is exponential. This means that the estimation error<br />
is bounded on the upper limit by a decreasing exponential of time, whose rate of convergence<br />
can be set by the user. The loop closure problem is studied in [57], Chapter 7, <strong>and</strong> a weak<br />
separation principle is stated in [113] (see also [21]).<br />
Our prototype observer is the <strong>Kalman</strong> <strong>filter</strong>. In order to further develop our motivations,<br />
we provide a review of <strong>high</strong>-<strong>gain</strong> observer algorithms in the next section. A complete discusion<br />
is the object of Section 2.5.<br />
A non measured state variable<br />
&!!<br />
%"!<br />
%!!<br />
$"!<br />
$!!<br />
#"!<br />
#!!<br />
"!<br />
Initial guess<br />
'()* +,-.)*<br />
/+0,1)0,2. 3,) ). (40(.5(5 6)*1). 7,*0(8<br />
/+0,1)0,2. 3,) ) 9,-9!-),. (40(.5(5 6)*1). 7,*0(8<br />
!<br />
! " #! #" $! $"<br />
Time<br />
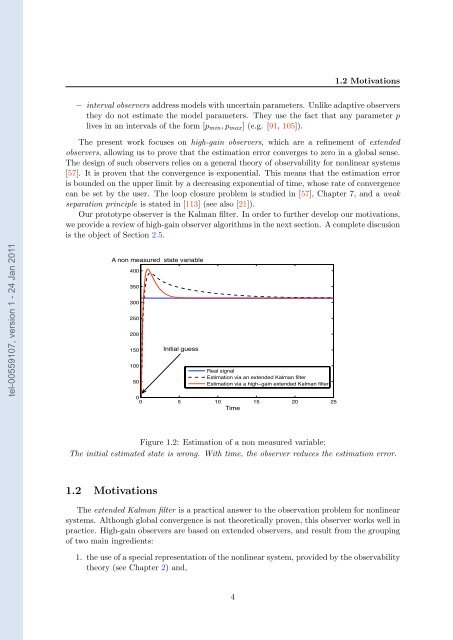
Figure 1.2: Estimation of a non measured variable:<br />
The initial estimated state is wrong. With time, the observer reduces the estimation error.<br />
1.2 Motivations<br />
The <strong>extended</strong> <strong>Kalman</strong> <strong>filter</strong> is a practical answer to the observation problem for nonlinear<br />
systems. Although global convergence is not theoretically proven, this observer works well in<br />
practice. High-<strong>gain</strong> observers are based on <strong>extended</strong> observers, <strong>and</strong> result from the grouping<br />
of two main ingredients:<br />
1. the use of a special representation of the nonlinear system, provided by the observability<br />
theory (see Chapter 2) <strong>and</strong>,<br />
4














