Bachelorarbeit Christoph Kaffatos - Fakultät 06 - Hochschule München
Bachelorarbeit Christoph Kaffatos - Fakultät 06 - Hochschule München
Bachelorarbeit Christoph Kaffatos - Fakultät 06 - Hochschule München

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Bewertung der automatischen Reckvorrichtung bei Übernahme<br />
4. Bewertung der automatischen Reckvorrichtung bei Übernahme<br />
Mit dem in Kapitel 3. beschriebenen manuellen Prozess als Vorlage wurde eine<br />
automatische Reckvorrichtung gebaut. Diese entsprach jedoch noch nicht den<br />
Anforderungen und sollte nach eingehender Bewertung optimiert werden.<br />
4.1. Beschreibung des automatischen Reckprozesses<br />
4.1.1. Aufbau der automatischen Reckvorrichtung vor der Optimierung<br />
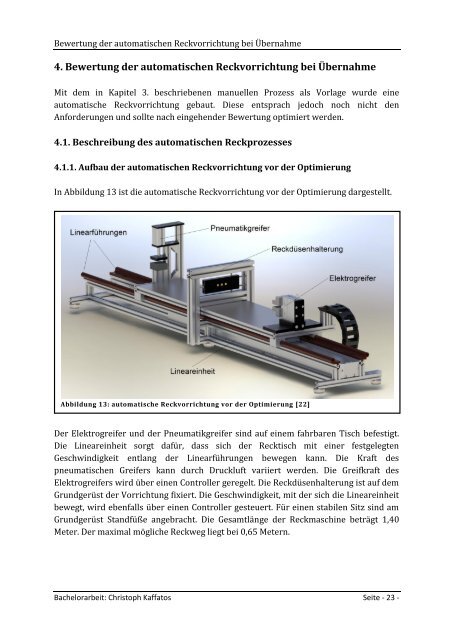
In Abbildung 13 ist die automatische Reckvorrichtung vor der Optimierung dargestellt.<br />
Abbildung 13: automatische Reckvorrichtung vor der Optimierung [22]<br />
Der Elektrogreifer und der Pneumatikgreifer sind auf einem fahrbaren Tisch befestigt.<br />
Die Lineareinheit sorgt dafür, dass sich der Recktisch mit einer festgelegten<br />
Geschwindigkeit entlang der Linearführungen bewegen kann. Die Kraft des<br />
pneumatischen Greifers kann durch Druckluft variiert werden. Die Greifkraft des<br />
Elektrogreifers wird über einen Controller geregelt. Die Reckdüsenhalterung ist auf dem<br />
Grundgerüst der Vorrichtung fixiert. Die Geschwindigkeit, mit der sich die Lineareinheit<br />
bewegt, wird ebenfalls über einen Controller gesteuert. Für einen stabilen Sitz sind am<br />
Grundgerüst Standfüße angebracht. Die Gesamtlänge der Reckmaschine beträgt 1,40<br />
Meter. Der maximal mögliche Reckweg liegt bei 0,65 Metern.<br />
<strong>Bachelorarbeit</strong>: <strong>Christoph</strong> <strong>Kaffatos</strong> Seite - 23 -