Bachelorarbeit Christoph Kaffatos - Fakultät 06 - Hochschule München
Bachelorarbeit Christoph Kaffatos - Fakultät 06 - Hochschule München
Bachelorarbeit Christoph Kaffatos - Fakultät 06 - Hochschule München

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Anpassung der Programmierung an den Reckprozess<br />
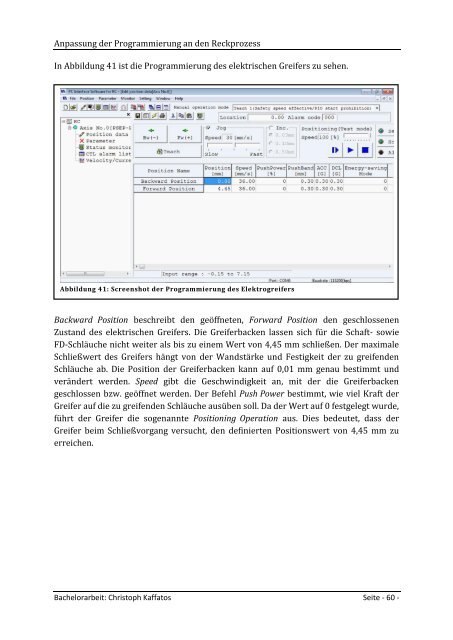
In Abbildung 41 ist die Programmierung des elektrischen Greifers zu sehen.<br />
Abbildung 41: Screenshot der Programmierung des Elektrogreifers<br />
Backward Position beschreibt den geöffneten, Forward Position den geschlossenen<br />
Zustand des elektrischen Greifers. Die Greiferbacken lassen sich für die Schaft- sowie<br />
FD-Schläuche nicht weiter als bis zu einem Wert von 4,45 mm schließen. Der maximale<br />
Schließwert des Greifers hängt von der Wandstärke und Festigkeit der zu greifenden<br />
Schläuche ab. Die Position der Greiferbacken kann auf 0,01 mm genau bestimmt und<br />
verändert werden. Speed gibt die Geschwindigkeit an, mit der die Greiferbacken<br />
geschlossen bzw. geöffnet werden. Der Befehl Push Power bestimmt, wie viel Kraft der<br />
Greifer auf die zu greifenden Schläuche ausüben soll. Da der Wert auf 0 festgelegt wurde,<br />
führt der Greifer die sogenannte Positioning Operation aus. Dies bedeutet, dass der<br />
Greifer beim Schließvorgang versucht, den definierten Positionswert von 4,45 mm zu<br />
erreichen.<br />
<strong>Bachelorarbeit</strong>: <strong>Christoph</strong> <strong>Kaffatos</strong> Seite - 60 -