

Inkrementelle Akquisition von 3D-Objektmodellen - Institut für ...
Inkrementelle Akquisition von 3D-Objektmodellen - Institut für ...
Inkrementelle Akquisition von 3D-Objektmodellen - Institut für ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
IR-INI 2006–01, c○ 2006 <strong>Institut</strong> <strong>für</strong> Neuroinformatik, Ruhr-Universität Bochum, FRG 35<br />
Abbildung 6.2: Punktkorrespondenzen zwischen zwei Bildern einer Sequenz<br />
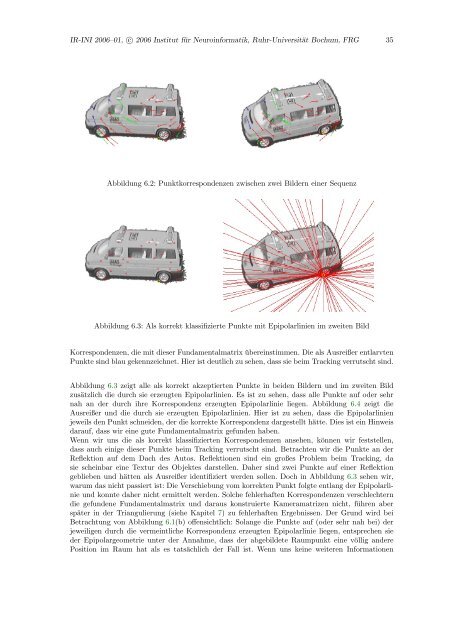
Abbildung 6.3: Als korrekt klassifizierte Punkte mit Epipolarlinien im zweiten Bild<br />
Korrespondenzen, die mit dieser Fundamentalmatrix übereinstimmen. Die als Ausreißer entlarvten<br />
Punkte sind blau gekennzeichnet. Hier ist deutlich zu sehen, dass sie beim Tracking verrutscht sind.<br />
Abbildung 6.3 zeigt alle als korrekt akzeptierten Punkte in beiden Bildern und im zweiten Bild<br />
zusätzlich die durch sie erzeugten Epipolarlinien. Es ist zu sehen, dass alle Punkte auf oder sehr<br />
nah an der durch ihre Korrespondenz erzeugten Epipolarlinie liegen. Abbildung 6.4 zeigt die<br />
Ausreißer und die durch sie erzeugten Epipolarlinien. Hier ist zu sehen, dass die Epipolarlinien<br />
jeweils den Punkt schneiden, der die korrekte Korrespondenz dargestellt hätte. Dies ist ein Hinweis<br />
darauf, dass wir eine gute Fundamentalmatrix gefunden haben.<br />
Wenn wir uns die als korrekt klassifizierten Korrespondenzen ansehen, können wir feststellen,<br />
dass auch einige dieser Punkte beim Tracking verrutscht sind. Betrachten wir die Punkte an der<br />
Reflektion auf dem Dach des Autos. Reflektionen sind ein großes Problem beim Tracking, da<br />
sie scheinbar eine Textur des Objektes darstellen. Daher sind zwei Punkte auf einer Reflektion<br />
geblieben und hätten als Ausreißer identifiziert werden sollen. Doch in Abbildung 6.3 sehen wir,<br />
warum das nicht passiert ist: Die Verschiebung vom korrekten Punkt folgte entlang der Epipolarlinie<br />
und konnte daher nicht ermittelt werden. Solche fehlerhaften Korrespondenzen verschlechtern<br />
die gefundene Fundamentalmatrix und daraus konstruierte Kameramatrizen nicht, führen aber<br />
später in der Triangulierung (siehe Kapitel 7) zu fehlerhaften Ergebnissen. Der Grund wird bei<br />
Betrachtung <strong>von</strong> Abbildung 6.1(b) offensichtlich: Solange die Punkte auf (oder sehr nah bei) der<br />
jeweiligen durch die vermeintliche Korrespondenz erzeugten Epipolarlinie liegen, entsprechen sie<br />
der Epipolargeometrie unter der Annahme, dass der abgebildete Raumpunkt eine völlig andere<br />
Position im Raum hat als es tatsächlich der Fall ist. Wenn uns keine weiteren Informationen














