

Inkrementelle Akquisition von 3D-Objektmodellen - Institut für ...
Inkrementelle Akquisition von 3D-Objektmodellen - Institut für ...
Inkrementelle Akquisition von 3D-Objektmodellen - Institut für ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
IR-INI 2006–01, c○ 2006 <strong>Institut</strong> <strong>für</strong> Neuroinformatik, Ruhr-Universität Bochum, FRG 43<br />
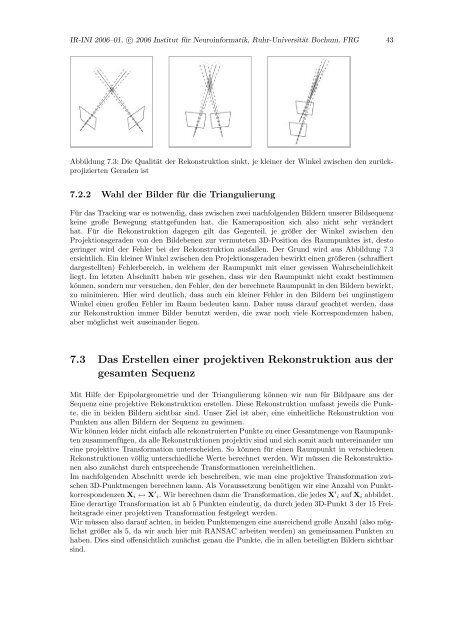
Abbildung 7.3: Die Qualität der Rekonstruktion sinkt, je kleiner der Winkel zwischen den zurückprojizierten<br />
Geraden ist<br />
7.2.2 Wahl der Bilder <strong>für</strong> die Triangulierung<br />
Für das Tracking war es notwendig, dass zwischen zwei nachfolgenden Bildern unserer Bildsequenz<br />
keine große Bewegung stattgefunden hat, die Kameraposition sich also nicht sehr verändert<br />
hat. Für die Rekonstruktion dagegen gilt das Gegenteil. je größer der Winkel zwischen den<br />
Projektionsgeraden <strong>von</strong> den Bildebenen zur vermuteten <strong>3D</strong>-Position des Raumpunktes ist, desto<br />
geringer wird der Fehler bei der Rekonstruktion ausfallen. Der Grund wird aus Abbildung 7.3<br />
ersichtlich. Ein kleiner Winkel zwischen den Projektionsgeraden bewirkt einen größeren (schraffiert<br />
dargestellten) Fehlerbereich, in welchem der Raumpunkt mit einer gewissen Wahrscheinlichkeit<br />
liegt. Im letzten Abschnitt haben wir gesehen, dass wir den Raumpunkt nicht exakt bestimmen<br />
können, sondern nur versuchen, den Fehler, den der berechnete Raumpunkt in den Bildern bewirkt,<br />
zu minimieren. Hier wird deutlich, dass auch ein kleiner Fehler in den Bildern bei ungünstigem<br />
Winkel einen großen Fehler im Raum bedeuten kann. Daher muss darauf geachtet werden, dass<br />
zur Rekonstruktion immer Bilder benutzt werden, die zwar noch viele Korrespondenzen haben,<br />
aber möglichst weit auseinander liegen.<br />
7.3 Das Erstellen einer projektiven Rekonstruktion aus der<br />
gesamten Sequenz<br />
Mit Hilfe der Epipolargeometrie und der Triangulierung können wir nun <strong>für</strong> Bildpaare aus der<br />
Sequenz eine projektive Rekonstruktion erstellen. Diese Rekonstruktion umfasst jeweils die Punkte,<br />
die in beiden Bildern sichtbar sind. Unser Ziel ist aber, eine einheitliche Rekonstruktion <strong>von</strong><br />
Punkten aus allen Bildern der Sequenz zu gewinnen.<br />
Wir können leider nicht einfach alle rekonstruierten Punkte zu einer Gesamtmenge <strong>von</strong> Raumpunkten<br />
zusammenfügen, da alle Rekonstruktionen projektiv sind und sich somit auch untereinander um<br />
eine projektive Transformation unterscheiden. So können <strong>für</strong> einen Raumpunkt in verschiedenen<br />
Rekonstruktionen völlig unterschiedliche Werte berechnet werden. Wir müssen die Rekonstruktionen<br />
also zunächst durch entsprechende Transformationen vereinheitlichen.<br />
Im nachfolgenden Abschnitt werde ich beschreiben, wie man eine projektive Transformation zwischen<br />
<strong>3D</strong>-Punktmengen berechnen kann. Als Voraussetzung benötigen wir eine Anzahl <strong>von</strong> Punktkorrespondenzen<br />
X i ↔ X ′ i. Wir berechnen dann die Transformation, die jedes X ′ i auf X i abbildet.<br />
Eine derartige Transformation ist ab 5 Punkten eindeutig, da durch jeden <strong>3D</strong>-Punkt 3 der 15 Freiheitsgrade<br />
einer projektiven Transformation festgelegt werden.<br />
Wir müssen also darauf achten, in beiden Punktemengen eine ausreichend große Anzahl (also möglichst<br />
größer als 5, da wir auch hier mit RANSAC arbeiten werden) an gemeinsamen Punkten zu<br />
haben. Dies sind offensichtlich zunächst genau die Punkte, die in allen beteiligten Bildern sichtbar<br />
sind.














