Edwin Jan Klein - Universiteit Twente
Edwin Jan Klein - Universiteit Twente
Edwin Jan Klein - Universiteit Twente

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
89<br />
Simulation and analysis<br />
executes all the calls of equal time simultaneously and calls the calculation<br />
functions of the proper primitives.<br />
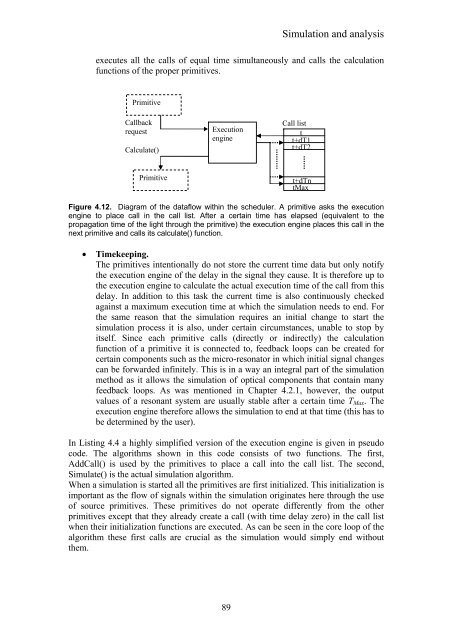
Primitive<br />
Callback<br />
request<br />
Calculate()<br />
Primitive<br />
Execution<br />
engine<br />
Call list<br />
t<br />
t+dT1<br />
t+dT2<br />
t+dTn<br />
tMax<br />
Figure 4.12. Diagram of the dataflow within the scheduler. A primitive asks the execution<br />
engine to place call in the call list. After a certain time has elapsed (equivalent to the<br />
propagation time of the light through the primitive) the execution engine places this call in the<br />
next primitive and calls its calculate() function.<br />
• Timekeeping.<br />
The primitives intentionally do not store the current time data but only notify<br />
the execution engine of the delay in the signal they cause. It is therefore up to<br />
the execution engine to calculate the actual execution time of the call from this<br />
delay. In addition to this task the current time is also continuously checked<br />
against a maximum execution time at which the simulation needs to end. For<br />
the same reason that the simulation requires an initial change to start the<br />
simulation process it is also, under certain circumstances, unable to stop by<br />
itself. Since each primitive calls (directly or indirectly) the calculation<br />
function of a primitive it is connected to, feedback loops can be created for<br />
certain components such as the micro-resonator in which initial signal changes<br />
can be forwarded infinitely. This is in a way an integral part of the simulation<br />
method as it allows the simulation of optical components that contain many<br />
feedback loops. As was mentioned in Chapter 4.2.1, however, the output<br />
values of a resonant system are usually stable after a certain time TMax. The<br />
execution engine therefore allows the simulation to end at that time (this has to<br />
be determined by the user).<br />
In Listing 4.4 a highly simplified version of the execution engine is given in pseudo<br />
code. The algorithms shown in this code consists of two functions. The first,<br />
AddCall() is used by the primitives to place a call into the call list. The second,<br />
Simulate() is the actual simulation algorithm.<br />
When a simulation is started all the primitives are first initialized. This initialization is<br />
important as the flow of signals within the simulation originates here through the use<br />
of source primitives. These primitives do not operate differently from the other<br />
primitives except that they already create a call (with time delay zero) in the call list<br />
when their initialization functions are executed. As can be seen in the core loop of the<br />
algorithm these first calls are crucial as the simulation would simply end without<br />
them.