JLR-10 Instruction Manual.pdf - Echomaster Marine Ltd.
JLR-10 Instruction Manual.pdf - Echomaster Marine Ltd.
JLR-10 Instruction Manual.pdf - Echomaster Marine Ltd.

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>JLR</strong>-<strong>10</strong> GPS Compass<br />
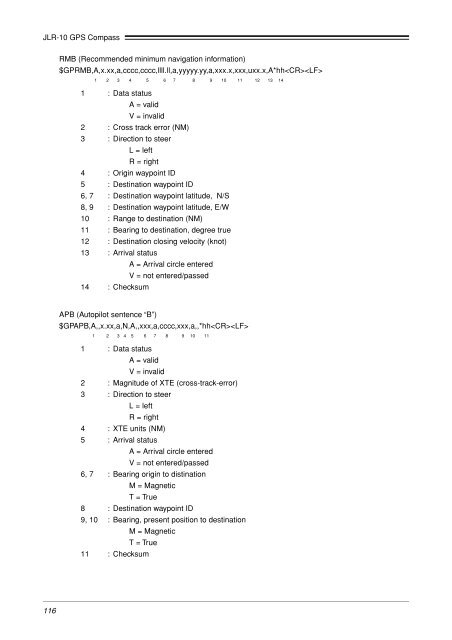
RMB (Recommended minimum navigation information)<br />
$GPRMB,A,x.xx,a,cccc,cccc,llll.ll,a,yyyyy.yy,a,xxx.x,xxx,uxx.x,A*hh<br />
1 2 3 4 5 6 7 8 9 <strong>10</strong> 11 12 13 14<br />
1 : Data status<br />
A = valid<br />
V = invalid<br />
2 : Cross track error (NM)<br />
3 : Direction to steer<br />
L = left<br />
R = right<br />
4 : Origin waypoint ID<br />
5 : Destination waypoint ID<br />
6, 7 : Destination waypoint latitude, N/S<br />
8, 9 : Destination waypoint latitude, E/W<br />
<strong>10</strong> : Range to destination (NM)<br />
11 : Bearing to destination, degree true<br />
12 : Destination closing velocity (knot)<br />
13 : Arrival status<br />
A = Arrival circle entered<br />
V = not entered/passed<br />
14 : Checksum<br />
APB (Autopilot sentence “B”)<br />
$GPAPB,A,,x.xx,a,N,A,,xxx,a,cccc,xxx,a,,*hh<br />
1 2 3 4 5 6 7 8 9 <strong>10</strong> 11<br />
1 : Data status<br />
A = valid<br />
V = invalid<br />
2 : Magnitude of XTE (cross-track-error)<br />
3 : Direction to steer<br />
L = left<br />
R = right<br />
4 : XTE units (NM)<br />
5 : Arrival status<br />
A = Arrival circle entered<br />
V = not entered/passed<br />
6, 7 : Bearing origin to distination<br />
M = Magnetic<br />
T = True<br />
8 : Destination waypoint ID<br />
9, <strong>10</strong> : Bearing, present position to destination<br />
M = Magnetic<br />
T = True<br />
11 : Checksum<br />
116