JLR-10 Instruction Manual.pdf - Echomaster Marine Ltd.
JLR-10 Instruction Manual.pdf - Echomaster Marine Ltd.
JLR-10 Instruction Manual.pdf - Echomaster Marine Ltd.

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>JLR</strong>-<strong>10</strong> GPS Compass<br />
4.20 Setting GPS Information<br />
For information on entry operations given below, see Section 4.6, “Basic Menu Selection Operations.”<br />
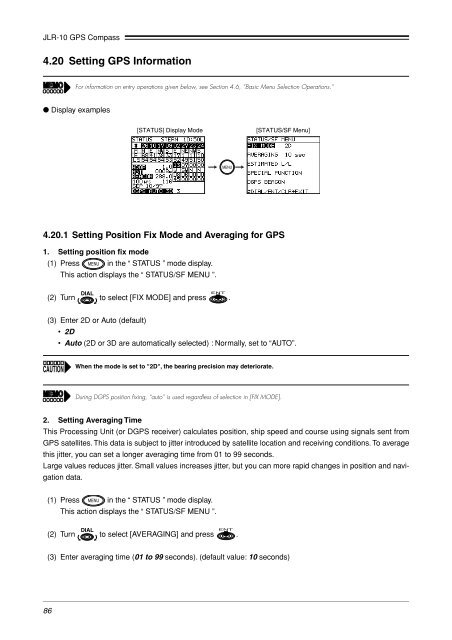
● Display examples<br />
[STATUS] Display Mode [STATUS/SF Menu]<br />
4.20.1 Setting Position Fix Mode and Averaging for GPS<br />
1. Setting position fix mode<br />
(1) Press in the “ STATUS ” mode display.<br />
This action displays the “ STATUS/SF MENU ”.<br />
(2) Turn to select [FIX MODE] and press .<br />
(3) Enter 2D or Auto (default)<br />
• 2D<br />
• Auto (2D or 3D are automatically selected) : Normally, set to “AUTO”.<br />
When the mode is set to "2D", the bearing precision may deteriorate.<br />
During DGPS position fixing, “auto” is used regardless of selection in [FIX MODE].<br />
2. Setting Averaging Time<br />
This Processing Unit (or DGPS receiver) calculates position, ship speed and course using signals sent from<br />
GPS satellites. This data is subject to jitter introduced by satellite location and receiving conditions. To average<br />
this jitter, you can set a longer averaging time from 01 to 99 seconds.<br />
Large values reduces jitter. Small values increases jitter, but you can more rapid changes in position and navigation<br />
data.<br />
(1) Press in the “ STATUS ” mode display.<br />
This action displays the “ STATUS/SF MENU ”.<br />
(2) Turn to select [AVERAGING] and press .<br />
(3) Enter averaging time (01 to 99 seconds). (default value: <strong>10</strong> seconds)<br />
86