
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
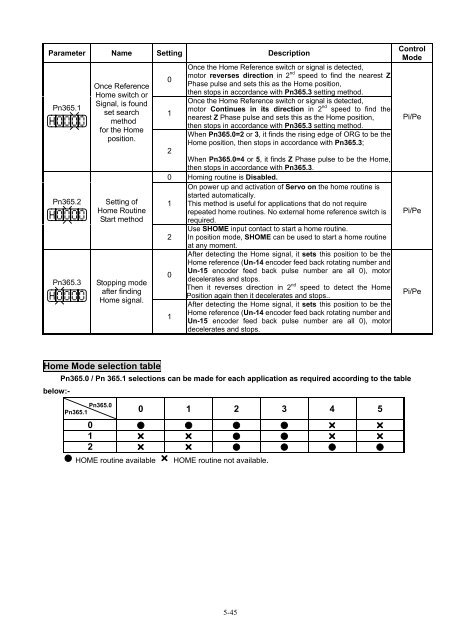
Parameter Name Setting Description<br />
Pn365.1<br />
Pn365.2<br />
Pn365.3<br />
Once Reference<br />
Home switch or<br />
Signal, is found<br />
set search<br />
method<br />
for the Home<br />
position.<br />
Setting of<br />
Home Routine<br />
Start method<br />
Stopping mode<br />
after finding<br />
Home signal.<br />
Once the Home Reference switch or signal is detected,<br />
motor reverses direction in 2 nd speed to find the nearest Z<br />
0<br />
Phase pulse and sets this as the Home position,<br />
then stops in accordance with Pn365.3 setting method.<br />
Once the Home Reference switch or signal is detected,<br />
motor Continues in its direction in 2 nd speed to find the<br />
1<br />
nearest Z Phase pulse and sets this as the Home position,<br />
then stops in accordance with Pn365.3 setting method.<br />
When Pn365.0=2 or 3, it finds the rising edge of ORG to be the<br />
Home position, then stops in accordance with Pn365.3;<br />
2<br />
When Pn365.0=4 or 5, it finds Z Phase pulse to be the Home,<br />
then stops in accordance with Pn365.3.<br />
0 Homing routine is Disabled.<br />
On power up and activation of Servo on the home routine is<br />
started automatically.<br />
1 This method is useful for applications that do not require<br />
repeated home routines. No external home reference switch is<br />
required.<br />
Use SHOME input contact to start a home routine.<br />
2 In position mode, SHOME can be used to start a home routine<br />
at any moment.<br />
After detecting the Home signal, it sets this position to be the<br />
Home reference (Un-14 encoder feed back rotating number and<br />
Un-15 encoder feed back pulse number are all 0), motor<br />
0<br />
decelerates and stops.<br />
Then it reverses direction in 2 nd speed to detect the Home<br />
Position again then it decelerates and stops..<br />
After detecting the Home signal, it sets this position to be the<br />
Home reference (Un-14 encoder feed back rotating number and<br />
1<br />
Un-15 encoder feed back pulse number are all 0), motor<br />
decelerates and stops.<br />
Control<br />
Mode<br />
Pi/Pe<br />
Pi/Pe<br />
Pi/Pe<br />
Home Mode selection table<br />
Pn365.0 / Pn 365.1 selections can be made for each application as required according to the table<br />
below:-<br />
Pn365.0<br />
Pn365.1 0 1 2 3 4 5<br />
0<br />
1<br />
2<br />
HOME routine available<br />
HOME routine not available.<br />
5-45