
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Chapter 4 Trial Operation<br />
Before proceeding with trial run, please ensure that all the wiring is correct.<br />
Trial run description below covers the operation from keypad and also from an external controller such as a PLC.<br />
Trial run with external controller speed control loop (analog voltage command) and position control loop<br />
(external pulse command).<br />
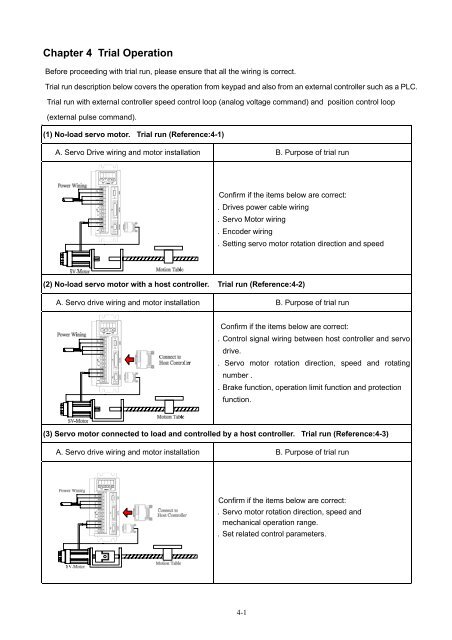
(1) No-load servo motor. Trial run (Reference:4-1)<br />
A. Servo Drive wiring and motor installation B. Purpose of trial run<br />
Confirm if the items below are correct:<br />
.Drives power cable wiring<br />
.Servo Motor wiring<br />
.Encoder wiring<br />
.Setting servo motor rotation direction and speed<br />
(2) No-load servo motor with a host controller. Trial run (Reference:4-2)<br />
A. Servo drive wiring and motor installation B. Purpose of trial run<br />
Confirm if the items below are correct:<br />
.Control signal wiring between host controller and servo<br />
drive.<br />
. Servo motor rotation direction, speed and rotating<br />
number .<br />
.Brake function, operation limit function and protection<br />
function.<br />
(3) Servo motor connected to load and controlled by a host controller. Trial run (Reference:4-3)<br />
A. Servo drive wiring and motor installation B. Purpose of trial run<br />
Confirm if the items below are correct:<br />
.Servo motor rotation direction, speed and<br />
mechanical operation range.<br />
.Set related control parameters.<br />
4-1