
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
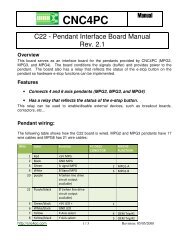
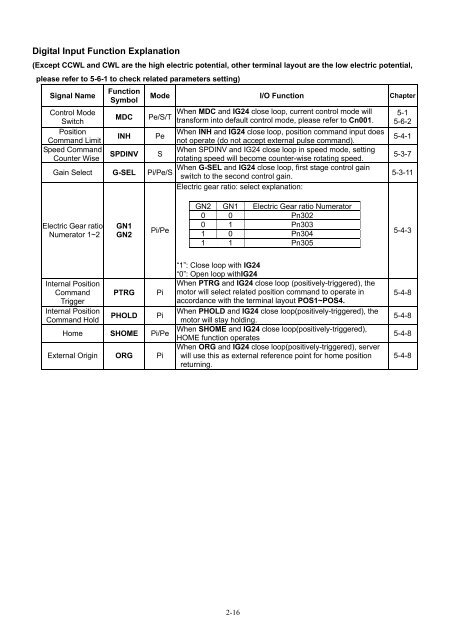
Digital Input Function Explanation<br />
(Except CCWL and CWL are the high electric potential, other terminal layout are the low electric potential,<br />
please refer to 5-6-1 to check related parameters setting)<br />
Signal Name<br />
Function<br />
Symbol<br />
Mode I/O Function Chapter<br />
Control Mode<br />
Switch<br />
MDC<br />
When MDC and IG24 close loop, current control mode will<br />
Pe/S/T<br />
transform into default control mode, please refer to Cn001.<br />
Position<br />
When INH and IG24 close loop, position command input does<br />
INH Pe<br />
Command Limit<br />
not operate (do not accept external pulse command).<br />
Speed Command<br />
When SPDINV and IG24 close loop in speed mode, setting<br />
SPDINV S<br />
Counter Wise<br />
rotating speed will become counter-wise rotating speed.<br />
Gain Select G-SEL<br />
When G-SEL and IG24 close loop, first stage control gain<br />
Pi/Pe/S<br />
switch to the second control gain.<br />
Electric gear ratio: select explanation:<br />
5-1<br />
5-6-2<br />
5-4-1<br />
5-3-7<br />
5-3-11<br />
Electric Gear ratio<br />
Numerator 1~2<br />
GN1<br />
GN2<br />
Pi/Pe<br />
GN2 GN1 Electric Gear ratio Numerator<br />
0 0 Pn302<br />
0 1 Pn303<br />
1 0 Pn304<br />
1 1 Pn305<br />
5-4-3<br />
Internal Position<br />
Command<br />
Trigger<br />
Internal Position<br />
Command Hold<br />
PTRG<br />
PHOLD<br />
Pi<br />
Pi<br />
Home SHOME Pi/Pe<br />
External Origin ORG Pi<br />
“1”: Close loop with IG24<br />
“0”: Open loop withIG24<br />
When PTRG and IG24 close loop (positively-triggered), the<br />
motor will select related position command to operate in<br />
accordance with the terminal layout POS1~POS4.<br />
When PHOLD and IG24 close loop(positively-triggered), the<br />
motor will stay holding.<br />
When SHOME and IG24 close loop(positively-triggered),<br />
HOME function operates<br />
When ORG and IG24 close loop(positively-triggered), server<br />
will use this as external reference point for home position<br />
returning.<br />
5-4-8<br />
5-4-8<br />
5-4-8<br />
5-4-8<br />
2-16