
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
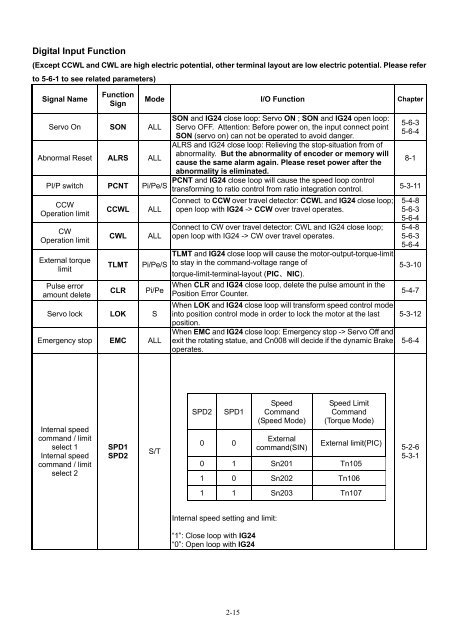
Digital Input Function<br />
(Except CCWL and CWL are high electric potential, other terminal layout are low electric potential. Please refer<br />
to 5-6-1 to see related parameters)<br />
Signal Name<br />
Function<br />
Sign<br />
Mode I/O Function Chapter<br />
Servo On SON ALL<br />
Abnormal Reset ALRS ALL<br />
PI/P switch PCNT Pi/Pe/S<br />
CCW<br />
Operation limit<br />
CW<br />
Operation limit<br />
External torque<br />
limit<br />
Pulse error<br />
amount delete<br />
CCWL<br />
CWL<br />
TLMT<br />
CLR<br />
ALL<br />
ALL<br />
Pi/Pe/S<br />
Pi/Pe<br />
Servo lock LOK S<br />
Emergency stop EMC ALL<br />
SON and IG24 close loop: Servo ON ; SON and IG24 open loop:<br />
Servo OFF. Attention: Before power on, the input connect point<br />
SON (servo on) can not be operated to avoid danger.<br />
ALRS and IG24 close loop: Relieving the stop-situation from of<br />
abnormality. But the abnormality of encoder or memory will<br />
cause the same alarm again. Please reset power after the<br />
abnormality is eliminated.<br />
PCNT and IG24 close loop will cause the speed loop control<br />
transforming to ratio control from ratio integration control.<br />
Connect to CCW over travel detector: CCWL and IG24 close loop;<br />
open loop with IG24 -> CCW over travel operates.<br />
Connect to CW over travel detector: CWL and IG24 close loop;<br />
open loop with IG24 -> CW over travel operates.<br />
TLMT and IG24 close loop will cause the motor-output-torque-limit<br />
to stay in the command-voltage range of<br />
torque-limit-terminal-layout (PIC、NIC).<br />
When CLR and IG24 close loop, delete the pulse amount in the<br />
Position Error Counter.<br />
When LOK and IG24 close loop will transform speed control mode<br />
into position control mode in order to lock the motor at the last<br />
position.<br />
When EMC and IG24 close loop: Emergency stop -> Servo Off and<br />
exit the rotating statue, and Cn008 will decide if the dynamic Brake<br />
operates.<br />
5-6-3<br />
5-6-4<br />
8-1<br />
5-3-11<br />
5-4-8<br />
5-6-3<br />
5-6-4<br />
5-4-8<br />
5-6-3<br />
5-6-4<br />
5-3-10<br />
5-4-7<br />
5-3-12<br />
5-6-4<br />
Internal speed<br />
command / limit<br />
select 1<br />
Internal speed<br />
command / limit<br />
select 2<br />
SPD1<br />
SPD2<br />
S/T<br />
SPD2<br />
SPD1<br />
0 0<br />
Speed<br />
Command<br />
(Speed Mode)<br />
External<br />
command(SIN)<br />
Speed Limit<br />
Command<br />
(Torque Mode)<br />
External limit(PIC)<br />
0 1 Sn201 Tn105<br />
1 0 Sn202 Tn106<br />
5-2-6<br />
5-3-1<br />
1 1 Sn203 Tn107<br />
Internal speed setting and limit:<br />
“1”: Close loop with IG24<br />
“0”: Open loop with IG24<br />
2-15