
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Parameter Name & Function Default Unit<br />
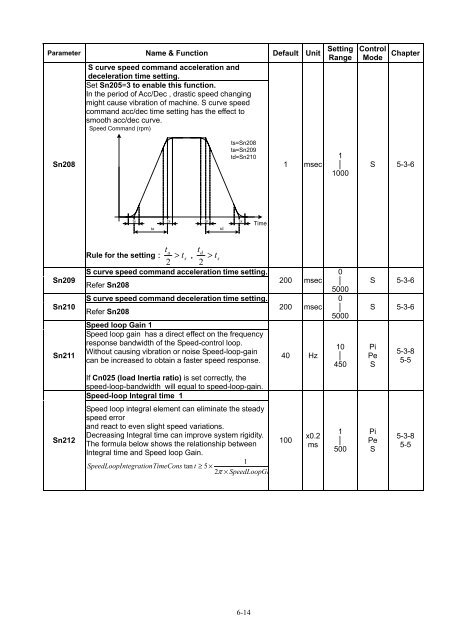
S curve speed command acceleration and<br />
deceleration time setting.<br />
Set Sn205=3 to enable this function.<br />
In the period of Acc/Dec , drastic speed changing<br />
might cause vibration of machine. S curve speed<br />
command acc/dec time setting has the effect to<br />
smooth acc/dec curve.<br />
Speed Command (rpm)<br />
Setting<br />
Range<br />
Control<br />
Mode<br />
Chapter<br />
Sn208<br />
ts=Sn208<br />
ta=Sn209<br />
td=Sn210<br />
1 msec<br />
1<br />
│<br />
1000<br />
S 5-3-6<br />
ts<br />
ta<br />
ts<br />
ts<br />
td<br />
ts<br />
Time<br />
Sn209<br />
Sn210<br />
Sn211<br />
t<br />
Rule for the setting: a<br />
t<br />
> t<br />
s<br />
, d<br />
> t<br />
s<br />
2 2<br />
S curve speed command acceleration time setting.<br />
Refer Sn208<br />
S curve speed command deceleration time setting.<br />
Refer Sn208<br />
Speed loop Gain 1<br />
Speed loop gain has a direct effect on the frequency<br />
response bandwidth of the Speed-control loop.<br />
Without causing vibration or noise Speed-loop-gain<br />
can be increased to obtain a faster speed response.<br />
200 msec<br />
200 msec<br />
40 Hz<br />
0<br />
│<br />
5000<br />
0<br />
│<br />
5000<br />
10<br />
│<br />
450<br />
S 5-3-6<br />
S 5-3-6<br />
Pi<br />
Pe<br />
S<br />
5-3-8<br />
5-5<br />
If Cn025 (load Inertia ratio) is set correctly, the<br />
speed-loop-bandwidth will equal to speed-loop-gain.<br />
Speed-loop Integral time 1<br />
Sn212<br />
Speed loop integral element can eliminate the steady<br />
speed error<br />
and react to even slight speed variations.<br />
Decreasing Integral time can improve system rigidity.<br />
The formula below shows the relationship between<br />
Integral time and Speed loop Gain.<br />
1<br />
SpeedLoopIntegrationTimeCons tan t ≥ 5 ×<br />
2π × SpeedLoopGa<br />
100<br />
x0.2<br />
ms<br />
1<br />
│<br />
500<br />
Pi<br />
Pe<br />
S<br />
5-3-8<br />
5-5<br />
6-14