
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
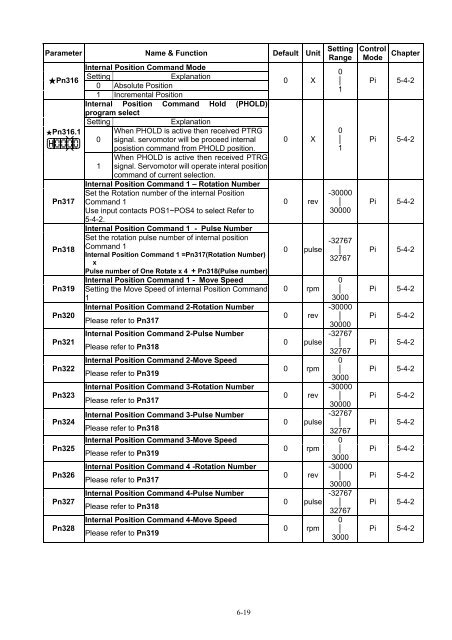
Parameter Name & Function Default Unit<br />
Internal Position Command Mode<br />
Setting<br />
Explanation<br />
★Pn316<br />
0 Absolute Position<br />
1 Incremental Position<br />
Internal Position Command Hold (PHOLD)<br />
program select<br />
Setting<br />
Explanation<br />
★Pn316.1 When PHOLD is active then received PTRG<br />
0 signal. servomotor will be proceed internal<br />
posistion command from PHOLD position.<br />
When PHOLD is active then received PTRG<br />
1 signal. Servomotor will operate interal position<br />
command of current selection.<br />
Internal Position Command 1 – Rotation Number<br />
Set the Rotation number of the internal Position<br />
Pn317 Command 1<br />
Use input contacts POS1~POS4 to select Refer to<br />
5-4-2.<br />
Internal Position Command 1 - Pulse Number<br />
Set the rotation pulse number of internal position<br />
Pn318<br />
Command 1<br />
Internal Position Command 1 =Pn317(Rotation Number)<br />
x<br />
Pulse number of One Rotate x 4 + Pn318(Pulse number)<br />
Internal Position Command 1 - Move Speed<br />
Pn319 Setting the Move Speed of internal Position Command<br />
1<br />
Internal Position Command 2-Rotation Number<br />
Pn320<br />
Please refer to Pn317<br />
Pn321<br />
Pn322<br />
Pn323<br />
Pn324<br />
Pn325<br />
Pn326<br />
Pn327<br />
Pn328<br />
Internal Position Command 2-Pulse Number<br />
Please refer to Pn318<br />
Internal Position Command 2-Move Speed<br />
Please refer to Pn319<br />
Internal Position Command 3-Rotation Number<br />
Please refer to Pn317<br />
Internal Position Command 3-Pulse Number<br />
Please refer to Pn318<br />
Internal Position Command 3-Move Speed<br />
Please refer to Pn319<br />
Internal Position Command 4 -Rotation Number<br />
Please refer to Pn317<br />
Internal Position Command 4-Pulse Number<br />
Please refer to Pn318<br />
Internal Position Command 4-Move Speed<br />
Please refer to Pn319<br />
0 X<br />
0 X<br />
0 rev<br />
0 pulse<br />
0 rpm<br />
0 rev<br />
0 pulse<br />
0 rpm<br />
0 rev<br />
0 pulse<br />
0 rpm<br />
0 rev<br />
0 pulse<br />
0 rpm<br />
Setting<br />
Range<br />
0<br />
│<br />
1<br />
0<br />
│<br />
1<br />
-30000<br />
│<br />
30000<br />
-32767<br />
│<br />
32767<br />
0<br />
│<br />
3000<br />
-30000<br />
│<br />
30000<br />
-32767<br />
│<br />
32767<br />
0<br />
│<br />
3000<br />
-30000<br />
│<br />
30000<br />
-32767<br />
│<br />
32767<br />
0<br />
│<br />
3000<br />
-30000<br />
│<br />
30000<br />
-32767<br />
│<br />
32767<br />
0<br />
│<br />
3000<br />
Control<br />
Mode<br />
Chapter<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
6-19