
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
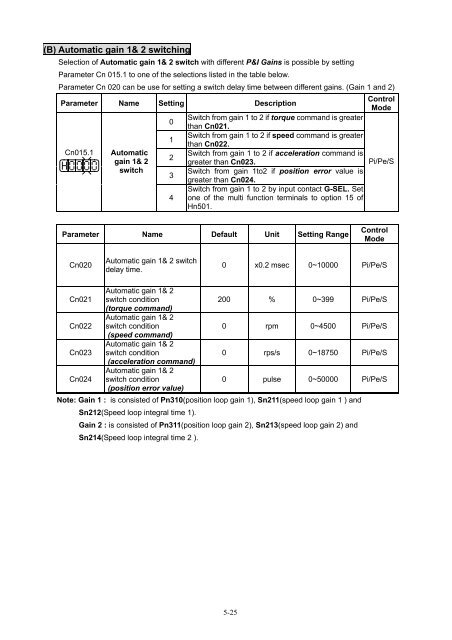
(B) Automatic gain 1& 2 switching<br />
Selection of Automatic gain 1& 2 switch with different P&I Gains is possible by setting<br />
Parameter Cn 015.1 to one of the selections listed in the table below.<br />
Parameter Cn 020 can be use for setting a switch delay time between different gains. (Gain 1 and 2)<br />
Parameter Name Setting Description<br />
Control<br />
Mode<br />
0<br />
Switch from gain 1 to 2 if torque command is greater<br />
than Cn021.<br />
1<br />
Switch from gain 1 to 2 if speed command is greater<br />
than Cn022.<br />
Cn015.1 Automatic<br />
Switch from gain 1 to 2 if acceleration command is<br />
2<br />
gain 1& 2<br />
greater than Cn023.<br />
Pi/Pe/S<br />
switch<br />
Switch from gain 1to2 if position error value is<br />
3<br />
greater than Cn024.<br />
Switch from gain 1 to 2 by input contact G-SEL. Set<br />
4 one of the multi function terminals to option 15 of<br />
Hn501.<br />
Parameter Name Default Unit Setting Range<br />
Control<br />
Mode<br />
Cn020<br />
Automatic gain 1& 2 switch<br />
delay time.<br />
0 x0.2 msec 0~10000 Pi/Pe/S<br />
Cn021<br />
Cn022<br />
Cn023<br />
Cn024<br />
Automatic gain 1& 2<br />
switch condition<br />
(torque command)<br />
Automatic gain 1& 2<br />
switch condition<br />
(speed command)<br />
Automatic gain 1& 2<br />
switch condition<br />
(acceleration command)<br />
Automatic gain 1& 2<br />
switch condition<br />
(position error value)<br />
200 % 0~399 Pi/Pe/S<br />
0 rpm 0~4500 Pi/Pe/S<br />
0 rps/s 0~18750 Pi/Pe/S<br />
0 pulse 0~50000 Pi/Pe/S<br />
Note: Gain 1 : is consisted of Pn310(position loop gain 1), Sn211(speed loop gain 1 ) and<br />
Sn212(Speed loop integral time 1).<br />
Gain 2 : is consisted of Pn311(position loop gain 2), Sn213(speed loop gain 2) and<br />
Sn214(Speed loop integral time 2 ).<br />
5-25