REER-Mosaic Manual
MOSAIC - Installation and use manual
MOSAIC - Installation and use manual

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
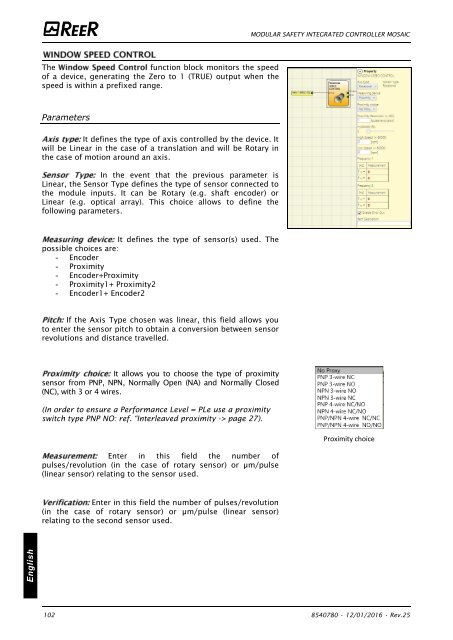
MODULAR SAFETY INTEGRATED CONTROLLER MOSAIC<br />
The<br />
function block monitors the speed<br />
of a device, generating the Zero to 1 (TRUE) output when the<br />
speed is within a prefixed range.<br />
Parameters<br />
It defines the type of axis controlled by the device. It<br />
will be Linear in the case of a translation and will be Rotary in<br />
the case of motion around an axis.<br />
In the event that the previous parameter is<br />
Linear, the Sensor Type defines the type of sensor connected to<br />
the module inputs. It can be Rotary (e.g. shaft encoder) or<br />
Linear (e.g. optical array). This choice allows to define the<br />
following parameters.<br />
It defines the type of sensor(s) used. The<br />
possible choices are:<br />
- Encoder<br />
- Proximity<br />
- Encoder+Proximity<br />
- Proximity1+ Proximity2<br />
- Encoder1+ Encoder2<br />
If the Axis Type chosen was linear, this field allows you<br />
to enter the sensor pitch to obtain a conversion between sensor<br />
revolutions and distance travelled.<br />
It allows you to choose the type of proximity<br />
sensor from PNP, NPN, Normally Open (NA) and Normally Closed<br />
(NC), with 3 or 4 wires.<br />
(In order to ensure a Performance Level = PLe use a proximity<br />
switch type PNP NO: ref. “Interleaved proximity -> page 27).<br />
Enter in this field the number of<br />
pulses/revolution (in the case of rotary sensor) or µm/pulse<br />
(linear sensor) relating to the sensor used.<br />
Proximity choice<br />
Enter in this field the number of pulses/revolution<br />
(in the case of rotary sensor) or µm/pulse (linear sensor)<br />
relating to the second sensor used.<br />
English<br />
102 8540780 • 12/01/2016 • Rev.25

![BRESIMAR(asaTek)-Beckhoff-Livro Formação Técnica TwinCAT 2-v1.2_2009 [pt]](https://img.yumpu.com/62853104/1/190x245/bresimarasatek-beckhoff-livro-formacao-tecnica-twincat-2-v12-2009-pt.jpg?quality=85)